|
Detailed Description
Macros | |
| #define | l3gd20GyroscopeGetAxesNumber(devp) gyroscopeGetAxesNumber(&((devp)->gyro_if)) |
| Return the number of axes of the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeReadRaw(devp, axes) gyroscopeReadRaw(&((devp)->gyro_if), axes) |
| Retrieves raw data from the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeReadCooked(devp, axes) gyroscopeReadCooked(&((devp)->gyro_if), axes) |
| Retrieves cooked data from the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeSampleBias(devp) gyroscopeSampleBias(&((devp)->gyro_if)) |
| Samples bias values for the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeSetBias(devp, bp) gyroscopeSetBias(&((devp)->gyro_if), bp) |
| Set bias values for the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeResetBias(devp) gyroscopeResetBias(&((devp)->gyro_if)) |
| Reset bias values for the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeSetSensitivity(devp, sp) gyroscopeSetSensitivity(&((devp)->gyro_if), sp) |
| Set sensitivity values for the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeResetSensitivity(devp) gyroscopeResetSensitivity(&((devp)->gyro_if)) |
| Reset sensitivity values for the BaseGyroscope. More... | |
| #define | l3gd20GyroscopeSetFullScale(devp, fs) (devp)->vmt->acc_set_full_scale(devp, fs) |
| Changes the L3GD20Driver gyroscope fullscale value. More... | |
Version identification | |
| #define | EX_L3GD20_VERSION "1.1.1" |
| L3GD20 driver version string. More... | |
| #define | EX_L3GD20_MAJOR 1 |
| L3GD20 driver version major number. More... | |
| #define | EX_L3GD20_MINOR 1 |
| L3GD20 driver version minor number. More... | |
| #define | EX_L3GD20_PATCH 1 |
| L3GD20 driver version patch number. More... | |
| #define | L3GD20_GYRO_NUMBER_OF_AXES 3U |
| L3GD20 gyroscope system characteristics. More... | |
Configuration options | |
| #define | L3GD20_USE_SPI TRUE |
| L3GD20 SPI interface switch. More... | |
| #define | L3GD20_SHARED_SPI FALSE |
| L3GD20 shared SPI switch. More... | |
| #define | L3GD20_USE_I2C FALSE |
| L3GD20 I2C interface switch. More... | |
| #define | L3GD20_SHARED_I2C FALSE |
| L3GD20 shared I2C switch. More... | |
| #define | L3GD20_GYRO_USE_ADVANCED FALSE |
| L3GD20 accelerometer subsystem advanced configurations switch. More... | |
| #define | L3GD20_BIAS_ACQ_TIMES 50 |
| Number of acquisitions for bias removal. More... | |
| #define | L3GD20_BIAS_SETTLING_US 5000 |
| Settling time for bias removal. More... | |
L3GD20 data structures and types. | |
| |
| typedef struct L3GD20Driver | L3GD20Driver |
| Structure representing a L3GD20 driver. More... | |
| #define | _l3gd20_methods_alone |
L3GD20 specific methods. More... | |
| #define | _l3gd20_methods |
L3GD20 specific methods with inherited ones. More... | |
| #define | _l3gd20_data |
L3GD20Driver specific data. More... | |
Data Structures | |
| struct | L3GD20Config |
| L3GD20 configuration structure. More... | |
| struct | L3GD20VMT |
L3GD20 virtual methods table. More... | |
| struct | L3GD20Driver |
| L3GD20 3-axis gyroscope class. More... | |
Functions | |
| static void | l3gd20SPIReadRegister (SPIDriver *spip, uint8_t reg, size_t n, uint8_t *b) |
| Reads a generic register value using SPI. More... | |
| static void | l3gd20SPIWriteRegister (SPIDriver *spip, uint8_t reg, size_t n, uint8_t *b) |
| Writes a value into a generic register using SPI. More... | |
| static size_t | gyro_get_axes_number (void *ip) |
| Return the number of axes of the BaseGyroscope. More... | |
| static msg_t | gyro_read_raw (void *ip, int32_t axes[L3GD20_GYRO_NUMBER_OF_AXES]) |
| Retrieves raw data from the BaseGyroscope. More... | |
| static msg_t | gyro_read_cooked (void *ip, float axes[]) |
| Retrieves cooked data from the BaseGyroscope. More... | |
| static msg_t | gyro_sample_bias (void *ip) |
| Samples bias values for the BaseGyroscope. More... | |
| static msg_t | gyro_set_bias (void *ip, float *bp) |
| Set bias values for the BaseGyroscope. More... | |
| static msg_t | gyro_reset_bias (void *ip) |
| Reset bias values for the BaseGyroscope. More... | |
| static msg_t | gyro_set_sensivity (void *ip, float *sp) |
| Set sensitivity values for the BaseGyroscope. More... | |
| static msg_t | gyro_reset_sensivity (void *ip) |
| Reset sensitivity values for the BaseGyroscope. More... | |
| static msg_t | gyro_set_full_scale (L3GD20Driver *devp, l3gd20_fs_t fs) |
| Changes the L3GD20Driver gyroscope fullscale value. More... | |
| void | l3gd20ObjectInit (L3GD20Driver *devp) |
| Initializes an instance. More... | |
| void | l3gd20Start (L3GD20Driver *devp, const L3GD20Config *config) |
| Configures and activates L3GD20 Complex Driver peripheral. More... | |
| void | l3gd20Stop (L3GD20Driver *devp) |
| Deactivates the L3GD20 Complex Driver peripheral. More... | |
Macro Definition Documentation
| #define EX_L3GD20_VERSION "1.1.1" |
| #define EX_L3GD20_MAJOR 1 |
| #define EX_L3GD20_MINOR 1 |
| #define EX_L3GD20_PATCH 1 |
| #define L3GD20_GYRO_NUMBER_OF_AXES 3U |
L3GD20 gyroscope system characteristics.
- Note
- Sensitivity is expressed as DPS/LSB whereas DPS stand for Degree per second [°/s].
- Bias is expressed as DPS.
Definition at line 71 of file l3gd20.h.
Referenced by gyro_get_axes_number(), gyro_read_cooked(), gyro_read_raw(), gyro_reset_bias(), gyro_reset_sensivity(), gyro_sample_bias(), gyro_set_bias(), gyro_set_full_scale(), gyro_set_sensivity(), and l3gd20Start().
| #define L3GD20_USE_SPI TRUE |
| #define L3GD20_SHARED_SPI FALSE |
| #define L3GD20_USE_I2C FALSE |
| #define L3GD20_SHARED_I2C FALSE |
| #define L3GD20_GYRO_USE_ADVANCED FALSE |
| #define L3GD20_BIAS_ACQ_TIMES 50 |
Number of acquisitions for bias removal.
This is the number of acquisitions performed to compute the bias. A repetition is required in order to remove noise.
Definition at line 289 of file l3gd20.h.
Referenced by gyro_sample_bias().
| #define L3GD20_BIAS_SETTLING_US 5000 |
Settling time for bias removal.
This is the time between each bias acquisition.
Definition at line 297 of file l3gd20.h.
Referenced by gyro_sample_bias().
| #define _l3gd20_methods_alone |
L3GD20 specific methods.
| #define _l3gd20_methods |
L3GD20 specific methods with inherited ones.
| #define _l3gd20_data |
L3GD20Driver specific data.
| #define l3gd20GyroscopeGetAxesNumber | ( | devp | ) | gyroscopeGetAxesNumber(&((devp)->gyro_if)) |
Return the number of axes of the BaseGyroscope.
- Parameters
-
[in] devp pointer to L3GD20Driver.
- Returns
- the number of axes.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeReadRaw | ( | devp, | |
| axes | |||
| ) | gyroscopeReadRaw(&((devp)->gyro_if), axes) |
Retrieves raw data from the BaseGyroscope.
- Note
- This data is retrieved from MEMS register without any algebraical manipulation.
- The axes array must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] devp pointer to L3GD20Driver.[out] axes a buffer which would be filled with raw data.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeReadCooked | ( | devp, | |
| axes | |||
| ) | gyroscopeReadCooked(&((devp)->gyro_if), axes) |
Retrieves cooked data from the BaseGyroscope.
- Note
- This data is manipulated according to the formula cooked = (raw * sensitivity) - bias.
- Final data is expressed as DPS.
- The axes array must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] devp pointer to L3GD20Driver.[out] axes a buffer which would be filled with cooked data.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeSampleBias | ( | devp | ) | gyroscopeSampleBias(&((devp)->gyro_if)) |
Samples bias values for the BaseGyroscope.
- Note
- The L3GD20 shall not be moved during the whole procedure.
- After this function internal bias is automatically updated.
-
The behavior of this function depends on
L3GD20_BIAS_ACQ_TIMESandL3GD20_BIAS_SETTLING_US.
- Parameters
-
[in] devp pointer to L3GD20Driver.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeSetBias | ( | devp, | |
| bp | |||
| ) | gyroscopeSetBias(&((devp)->gyro_if), bp) |
Set bias values for the BaseGyroscope.
- Note
- Bias must be expressed as DPS.
- The bias buffer must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] devp pointer to L3GD20Driver.[in] bp a buffer which contains biases.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeResetBias | ( | devp | ) | gyroscopeResetBias(&((devp)->gyro_if)) |
Reset bias values for the BaseGyroscope.
- Note
- Default biases value are obtained from device datasheet when available otherwise they are considered zero.
- Parameters
-
[in] devp pointer to L3GD20Driver.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeSetSensitivity | ( | devp, | |
| sp | |||
| ) | gyroscopeSetSensitivity(&((devp)->gyro_if), sp) |
Set sensitivity values for the BaseGyroscope.
- Note
- Sensitivity must be expressed as DPS/LSB.
- The sensitivity buffer must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] devp pointer to L3GD20Driver.[in] sp a buffer which contains sensitivities.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeResetSensitivity | ( | devp | ) | gyroscopeResetSensitivity(&((devp)->gyro_if)) |
Reset sensitivity values for the BaseGyroscope.
- Note
- Default sensitivities value are obtained from device datasheet.
- Parameters
-
[in] devp pointer to L3GD20Driver.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded. MSG_RESET otherwise.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
| #define l3gd20GyroscopeSetFullScale | ( | devp, | |
| fs | |||
| ) | (devp)->vmt->acc_set_full_scale(devp, fs) |
Changes the L3GD20Driver gyroscope fullscale value.
- Note
- This function also rescale sensitivities and biases based on previous and next fullscale value.
- A recalibration is highly suggested after calling this function.
- Parameters
-
[in] devp pointer to L3GD20Driver.[in] fs new fullscale value.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded. MSG_RESET otherwise.
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Typedef Documentation
| typedef struct L3GD20Driver L3GD20Driver |
Enumeration Type Documentation
| enum l3gd20_fs_t |
| enum l3gd20_odr_t |
| enum l3gd20_bw_t |
| enum l3gd20_bdu_t |
| enum l3gd20_hpm_t |
| enum l3gd20_hpcf_t |
L3GD20 HP configuration.
| enum l3gd20_lp2m_t |
| enum l3gd20_end_t |
| enum l3gd20_state_t |
Function Documentation
|
static |
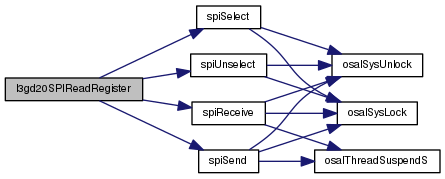
Reads a generic register value using SPI.
- Precondition
- The SPI interface must be initialized and the driver started.
- Parameters
-
[in] spip pointer to the SPI interface [in] reg starting register address [in] n number of consecutive registers to read [in] b pointer to an output buffer.
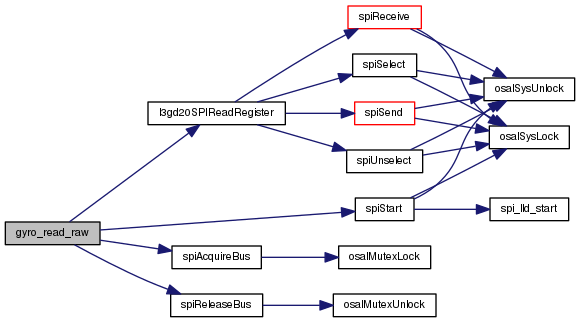
Definition at line 59 of file l3gd20.c.
References spiReceive(), spiSelect(), spiSend(), and spiUnselect().
Referenced by gyro_read_raw(), and gyro_set_full_scale().
|
static |
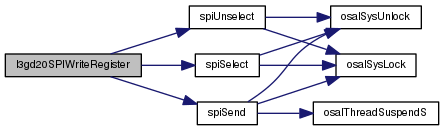
Writes a value into a generic register using SPI.
- Precondition
- The SPI interface must be initialized and the driver started.
- Parameters
-
[in] spip pointer to the SPI interface [in] reg starting register address [in] n number of adjacent registers to write [in] b pointer to a buffer of values.
Definition at line 78 of file l3gd20.c.
References spiSelect(), spiSend(), and spiUnselect().
Referenced by gyro_set_full_scale(), l3gd20Start(), and l3gd20Stop().
|
static |
Return the number of axes of the BaseGyroscope.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.
- Returns
- the number of axes.
Definition at line 96 of file l3gd20.c.
References L3GD20_GYRO_NUMBER_OF_AXES.
Referenced by gyro_set_full_scale().
|
static |
Retrieves raw data from the BaseGyroscope.
- Note
- This data is retrieved from MEMS register without any algebraical manipulation.
- The axes array must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.[out] axes a buffer which would be filled with raw data.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
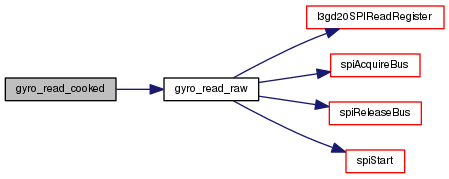
Definition at line 115 of file l3gd20.c.
References L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, l3gd20SPIReadRegister(), MSG_OK, objGetInstance, osalDbgAssert, osalDbgCheck, SPI_READY, spiAcquireBus(), spiReleaseBus(), and spiStart().
Referenced by gyro_read_cooked(), gyro_sample_bias(), and gyro_set_full_scale().
|
static |
Retrieves cooked data from the BaseGyroscope.
- Note
- This data is manipulated according to the formula cooked = (raw * sensitivity) - bias.
- Final data is expressed as DPS.
- The axes array must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.[out] axes a buffer which would be filled with cooked data.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
Definition at line 167 of file l3gd20.c.
References gyro_read_raw(), L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, objGetInstance, osalDbgAssert, and osalDbgCheck.
Referenced by gyro_set_full_scale().
|
static |
Samples bias values for the BaseGyroscope.
- Note
- The L3GD20 shall not be moved during the whole procedure.
- After this function internal bias is automatically updated.
-
The behavior of this function depends on
L3GD20_BIAS_ACQ_TIMESandL3GD20_BIAS_SETTLING_US.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
Definition at line 200 of file l3gd20.c.
References gyro_read_raw(), L3GD20_BIAS_ACQ_TIMES, L3GD20_BIAS_SETTLING_US, L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, MSG_OK, objGetInstance, osalDbgAssert, osalDbgCheck, osalThreadSleepMicroseconds, and SPI_READY.
Referenced by gyro_set_full_scale().

|
static |
Set bias values for the BaseGyroscope.
- Note
- Bias must be expressed as DPS.
- The bias buffer must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.[in] bp a buffer which contains biases.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
Definition at line 248 of file l3gd20.c.
References L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, MSG_OK, objGetInstance, osalDbgAssert, and osalDbgCheck.
Referenced by gyro_set_full_scale().
|
static |
Reset bias values for the BaseGyroscope.
- Note
- Default biases value are obtained from device datasheet when available otherwise they are considered zero.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
Definition at line 277 of file l3gd20.c.
References L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, MSG_OK, objGetInstance, osalDbgAssert, and osalDbgCheck.
Referenced by gyro_set_full_scale().
|
static |
Set sensitivity values for the BaseGyroscope.
- Note
- Sensitivity must be expressed as DPS/LSB.
- The sensitivity buffer must be at least the same size of the BaseGyroscope axes number.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.[in] sp a buffer which contains sensitivities.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded.
Definition at line 307 of file l3gd20.c.
References L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, MSG_OK, objGetInstance, osalDbgAssert, and osalDbgCheck.
Referenced by gyro_set_full_scale().
|
static |
Reset sensitivity values for the BaseGyroscope.
- Note
- Default sensitivities value are obtained from device datasheet.
- Parameters
-
[in] ip pointer to BaseGyroscopeinterface.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded. MSG_RESET otherwise.
Definition at line 336 of file l3gd20.c.
References FALSE, L3GD20_FS_2000DPS, L3GD20_FS_250DPS, L3GD20_FS_500DPS, L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, MSG_OK, MSG_RESET, objGetInstance, osalDbgAssert, and osalDbgCheck.
Referenced by gyro_set_full_scale().
|
static |
Changes the L3GD20Driver gyroscope fullscale value.
- Note
- This function also rescale sensitivities and biases based on previous and next fullscale value.
- A recalibration is highly suggested after calling this function.
- Parameters
-
[in] devp pointer to BaseGyroscopeinterface.[in] fs new fullscale value.
- Returns
- The operation status.
- Return values
-
MSG_OK if the function succeeded. MSG_RESET otherwise.
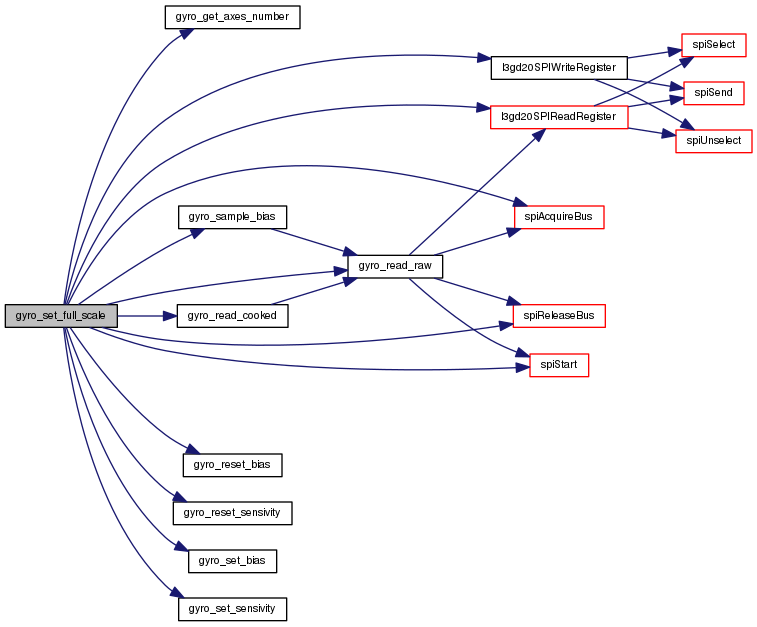
Definition at line 378 of file l3gd20.c.
References gyro_get_axes_number(), gyro_read_cooked(), gyro_read_raw(), gyro_reset_bias(), gyro_reset_sensivity(), gyro_sample_bias(), gyro_set_bias(), gyro_set_sensivity(), L3GD20_FS_2000DPS, L3GD20_FS_250DPS, L3GD20_FS_500DPS, L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_READY, l3gd20SPIReadRegister(), l3gd20SPIWriteRegister(), MSG_OK, MSG_RESET, osalDbgAssert, osalDbgCheck, SPI_READY, spiAcquireBus(), spiReleaseBus(), and spiStart().
| void l3gd20ObjectInit | ( | L3GD20Driver * | devp | ) |
Initializes an instance.
- Parameters
-
[out] devp pointer to the L3GD20Driverobject
- Function Class:Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Definition at line 473 of file l3gd20.c.
References L3GD20Driver::gyro_if, L3GD20_STOP, BaseGyroscope::vmt, and L3GD20Driver::vmt.
| void l3gd20Start | ( | L3GD20Driver * | devp, |
| const L3GD20Config * | config | ||
| ) |
Configures and activates L3GD20 Complex Driver peripheral.
- Parameters
-
[in] devp pointer to the L3GD20Driverobject[in] config pointer to the L3GD20Configobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 490 of file l3gd20.c.
References FALSE, L3GD20_FS_2000DPS, L3GD20_FS_250DPS, L3GD20_FS_500DPS, L3GD20_GYRO_NUMBER_OF_AXES, L3GD20_HPM_BYPASSED, L3GD20_LP2M_BYPASSED, L3GD20_READY, L3GD20_STOP, l3gd20SPIWriteRegister(), osalDbgAssert, osalDbgCheck, osalThreadSleepMilliseconds, spiAcquireBus(), spiReleaseBus(), and spiStart().

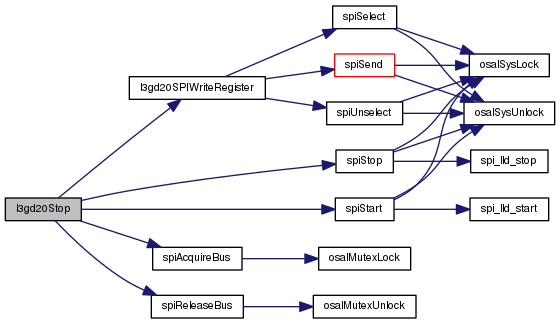
| void l3gd20Stop | ( | L3GD20Driver * | devp | ) |
Deactivates the L3GD20 Complex Driver peripheral.
- Parameters
-
[in] devp pointer to the L3GD20Driverobject
- Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 613 of file l3gd20.c.
References L3GD20_READY, L3GD20_STOP, l3gd20SPIWriteRegister(), osalDbgAssert, osalDbgCheck, spiAcquireBus(), spiReleaseBus(), spiStart(), and spiStop().