Generic UART Driver. More...
Detailed Description
Generic UART Driver.
This driver abstracts a generic UART (Universal Asynchronous Receiver Transmitter) peripheral, the API is designed to be:
- Unbuffered and copy-less, transfers are always directly performed from/to the application-level buffers without extra copy operations.
- Asynchronous, the API is always non blocking.
- Callbacks capable, operations completion and other events are notified using callbacks.
Special hardware features like deep hardware buffers, DMA transfers are hidden to the user but fully supportable by the low level implementations.
This driver model is best used where communication events are meant to drive an higher level state machine, as example:
- RS485 drivers.
- Multipoint network drivers.
- Serial protocol decoders.
If your application requires a synchronous buffered driver then the Serial Driver should be used instead.
- Precondition
- In order to use the UART driver the
HAL_USE_UARToption must be enabled inhalconf.h.
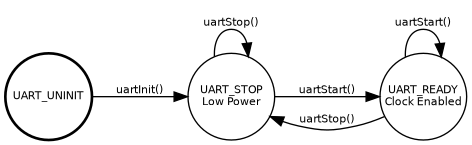
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment, any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).
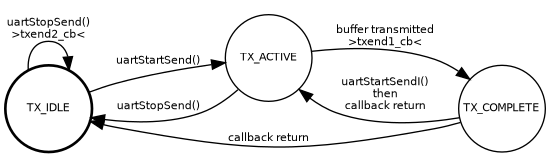
Transmitter sub State Machine
The follow diagram describes the transmitter state machine, this diagram is valid while the driver is in the UART_READY state. This state machine is automatically reset to the TX_IDLE state each time the driver enters the UART_READY state.
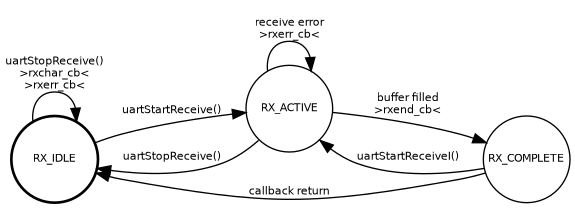
Receiver sub State Machine
The follow diagram describes the receiver state machine, this diagram is valid while the driver is in the UART_READY state. This state machine is automatically reset to the RX_IDLE state each time the driver enters the UART_READY state.

UART status flags | |
| #define | UART_NO_ERROR 0 |
| No pending conditions. | |
| #define | UART_PARITY_ERROR 4 |
| Parity error happened. | |
| #define | UART_FRAMING_ERROR 8 |
| Framing error happened. | |
| #define | UART_OVERRUN_ERROR 16 |
| Overflow happened. | |
| #define | UART_NOISE_ERROR 32 |
| Noise on the line. | |
| #define | UART_BREAK_DETECTED 64 |
| Break detected. | |
UART error conditions | |
| #define | UART_ERR_NOT_ACTIVE (size_t)-1 |
UART configuration options | |
| #define | UART_USE_WAIT FALSE |
| Enables synchronous APIs. | |
| #define | UART_USE_MUTUAL_EXCLUSION FALSE |
Enables the uartAcquireBus() and uartReleaseBus() APIs. | |
Low level driver helper macros | |
| #define | _uart_wakeup_tx1_isr(uartp) |
| Wakes up the waiting thread in case of early TX complete. | |
| #define | _uart_wakeup_tx2_isr(uartp) |
| Wakes up the waiting thread in case of late TX complete. | |
| #define | _uart_wakeup_rx_complete_isr(uartp) |
| Wakes up the waiting thread in case of RX complete. | |
| #define | _uart_wakeup_rx_error_isr(uartp) |
| Wakes up the waiting thread in case of RX error. | |
| #define | _uart_wakeup_rx_cm_isr(uartp) |
| Wakes up the waiting thread in case of RX character match. | |
| #define | _uart_wakeup_rx_timeout_isr(uartp) |
| Wakes up the waiting thread in case of RX timeout. | |
| #define | _uart_tx1_isr_code(uartp) |
| Common ISR code for early TX. | |
| #define | _uart_tx2_isr_code(uartp) |
| Common ISR code for late TX. | |
| #define | _uart_rx_complete_isr_code(uartp) |
| Common ISR code for RX complete. | |
| #define | _uart_rx_error_isr_code(uartp, errors) |
| Common ISR code for RX error. | |
| #define | _uart_rx_idle_code(uartp) |
| Common ISR code for RX on idle. | |
| #define | _uart_timeout_isr_code(uartp) |
| Timeout ISR code for receiver. | |
| #define | _uart_rx_char_match_isr_code(uartp) |
| Character match ISR code for receiver. | |
PLATFORM configuration options | |
| #define | PLATFORM_UART_USE_UART1 FALSE |
| UART driver enable switch. | |
Data Structures | |
| struct | hal_uart_config |
| Driver configuration structure. More... | |
| struct | hal_uart_driver |
| Structure representing an UART driver. More... | |
Typedefs | |
| typedef uint32_t | uartflags_t |
| UART driver condition flags type. | |
| typedef struct hal_uart_driver | UARTDriver |
| Type of structure representing an UART driver. | |
| typedef void(* | uartcb_t) (UARTDriver *uartp) |
| Generic UART notification callback type. | |
| typedef void(* | uartccb_t) (UARTDriver *uartp, uint16_t c) |
| Character received UART notification callback type. | |
| typedef void(* | uartecb_t) (UARTDriver *uartp, uartflags_t e) |
| Receive error UART notification callback type. | |
| typedef struct hal_uart_config | UARTConfig |
| Driver configuration structure. | |
Enumerations | |
| enum | uartstate_t { UART_UNINIT = 0 , UART_STOP = 1 , UART_READY = 2 } |
| Driver state machine possible states. More... | |
| enum | uarttxstate_t { UART_TX_IDLE = 0 , UART_TX_ACTIVE = 1 } |
| Transmitter state machine states. More... | |
| enum | uartrxstate_t { UART_RX_IDLE = 0 , UART_RX_ACTIVE = 1 } |
| Receiver state machine states. More... | |
Functions | |
| void | uartInit (void) |
| UART Driver initialization. | |
| void | uartObjectInit (UARTDriver *uartp) |
Initializes the standard part of a UARTDriver structure. | |
| msg_t | uartStart (UARTDriver *uartp, const UARTConfig *config) |
| Configures and activates the UART peripheral. | |
| void | uartStop (UARTDriver *uartp) |
| Deactivates the UART peripheral. | |
| void | uartStartSend (UARTDriver *uartp, size_t n, const void *txbuf) |
| Starts a transmission on the UART peripheral. | |
| void | uartStartSendI (UARTDriver *uartp, size_t n, const void *txbuf) |
| Starts a transmission on the UART peripheral. | |
| size_t | uartStopSend (UARTDriver *uartp) |
| Stops any ongoing transmission. | |
| size_t | uartStopSendI (UARTDriver *uartp) |
| Stops any ongoing transmission. | |
| void | uartStartReceive (UARTDriver *uartp, size_t n, void *rxbuf) |
| Starts a receive operation on the UART peripheral. | |
| void | uartStartReceiveI (UARTDriver *uartp, size_t n, void *rxbuf) |
| Starts a receive operation on the UART peripheral. | |
| size_t | uartStopReceive (UARTDriver *uartp) |
| Stops any ongoing receive operation. | |
| size_t | uartStopReceiveI (UARTDriver *uartp) |
| Stops any ongoing receive operation. | |
| msg_t | uartSendTimeout (UARTDriver *uartp, size_t *np, const void *txbuf, sysinterval_t timeout) |
| Performs a transmission on the UART peripheral. | |
| msg_t | uartSendFullTimeout (UARTDriver *uartp, size_t *np, const void *txbuf, sysinterval_t timeout) |
| Performs a transmission on the UART peripheral. | |
| msg_t | uartReceiveTimeout (UARTDriver *uartp, size_t *np, void *rxbuf, sysinterval_t timeout) |
| Performs a receive operation on the UART peripheral. | |
| void | uartAcquireBus (UARTDriver *uartp) |
| Gains exclusive access to the UART bus. | |
| void | uartReleaseBus (UARTDriver *uartp) |
| Releases exclusive access to the UART bus. | |
| void | uart_lld_init (void) |
| Low level UART driver initialization. | |
| void | uart_lld_start (UARTDriver *uartp) |
| Configures and activates the UART peripheral. | |
| void | uart_lld_stop (UARTDriver *uartp) |
| Deactivates the UART peripheral. | |
| void | uart_lld_start_send (UARTDriver *uartp, size_t n, const void *txbuf) |
| Starts a transmission on the UART peripheral. | |
| size_t | uart_lld_stop_send (UARTDriver *uartp) |
| Stops any ongoing transmission. | |
| void | uart_lld_start_receive (UARTDriver *uartp, size_t n, void *rxbuf) |
| Starts a receive operation on the UART peripheral. | |
| size_t | uart_lld_stop_receive (UARTDriver *uartp) |
| Stops any ongoing receive operation. | |
Variables | |
| UARTDriver | UARTD1 |
| UART1 driver identifier. | |
Macro Definition Documentation
◆ UART_NO_ERROR
| #define UART_NO_ERROR 0 |
No pending conditions.
Definition at line 38 of file hal_uart.h.
◆ UART_PARITY_ERROR
| #define UART_PARITY_ERROR 4 |
Parity error happened.
Definition at line 39 of file hal_uart.h.
◆ UART_FRAMING_ERROR
| #define UART_FRAMING_ERROR 8 |
Framing error happened.
Definition at line 40 of file hal_uart.h.
◆ UART_OVERRUN_ERROR
| #define UART_OVERRUN_ERROR 16 |
Overflow happened.
Definition at line 41 of file hal_uart.h.
◆ UART_NOISE_ERROR
| #define UART_NOISE_ERROR 32 |
Noise on the line.
Definition at line 42 of file hal_uart.h.
◆ UART_BREAK_DETECTED
| #define UART_BREAK_DETECTED 64 |
Break detected.
Definition at line 43 of file hal_uart.h.
◆ UART_ERR_NOT_ACTIVE
| #define UART_ERR_NOT_ACTIVE (size_t)-1 |
Definition at line 50 of file hal_uart.h.
Referenced by uartStopReceive(), uartStopReceiveI(), uartStopSend(), and uartStopSendI().
◆ UART_USE_WAIT
| #define UART_USE_WAIT FALSE |
Enables synchronous APIs.
- Note
- Disabling this option saves both code and data space.
Definition at line 66 of file hal_uart.h.
◆ UART_USE_MUTUAL_EXCLUSION
| #define UART_USE_MUTUAL_EXCLUSION FALSE |
Enables the uartAcquireBus() and uartReleaseBus() APIs.
- Note
- Disabling this option saves both code and data space.
Definition at line 74 of file hal_uart.h.
◆ _uart_wakeup_tx1_isr
| #define _uart_wakeup_tx1_isr | ( | uartp | ) |
Wakes up the waiting thread in case of early TX complete.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 129 of file hal_uart.h.
◆ _uart_wakeup_tx2_isr
| #define _uart_wakeup_tx2_isr | ( | uartp | ) |
Wakes up the waiting thread in case of late TX complete.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 148 of file hal_uart.h.
◆ _uart_wakeup_rx_complete_isr
| #define _uart_wakeup_rx_complete_isr | ( | uartp | ) |
Wakes up the waiting thread in case of RX complete.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 167 of file hal_uart.h.
◆ _uart_wakeup_rx_error_isr
| #define _uart_wakeup_rx_error_isr | ( | uartp | ) |
Wakes up the waiting thread in case of RX error.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 184 of file hal_uart.h.
◆ _uart_wakeup_rx_cm_isr
| #define _uart_wakeup_rx_cm_isr | ( | uartp | ) |
Wakes up the waiting thread in case of RX character match.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 201 of file hal_uart.h.
◆ _uart_wakeup_rx_timeout_isr
| #define _uart_wakeup_rx_timeout_isr | ( | uartp | ) |
Wakes up the waiting thread in case of RX timeout.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 218 of file hal_uart.h.
◆ _uart_tx1_isr_code
| #define _uart_tx1_isr_code | ( | uartp | ) |
Common ISR code for early TX.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 241 of file hal_uart.h.
◆ _uart_tx2_isr_code
| #define _uart_tx2_isr_code | ( | uartp | ) |
Common ISR code for late TX.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 263 of file hal_uart.h.
◆ _uart_rx_complete_isr_code
| #define _uart_rx_complete_isr_code | ( | uartp | ) |
Common ISR code for RX complete.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 284 of file hal_uart.h.
◆ _uart_rx_error_isr_code
| #define _uart_rx_error_isr_code | ( | uartp, | |
| errors ) |
Common ISR code for RX error.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] errors mask of errors to be reported
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 308 of file hal_uart.h.
◆ _uart_rx_idle_code
| #define _uart_rx_idle_code | ( | uartp | ) |
Common ISR code for RX on idle.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 329 of file hal_uart.h.
◆ _uart_timeout_isr_code
| #define _uart_timeout_isr_code | ( | uartp | ) |
Timeout ISR code for receiver.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 348 of file hal_uart.h.
◆ _uart_rx_char_match_isr_code
| #define _uart_rx_char_match_isr_code | ( | uartp | ) |
Character match ISR code for receiver.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 369 of file hal_uart.h.
◆ PLATFORM_UART_USE_UART1
| #define PLATFORM_UART_USE_UART1 FALSE |
UART driver enable switch.
If set to TRUE the support for UART1 is included.
- Note
- The default is
FALSE.
Definition at line 48 of file hal_uart_lld.h.
Typedef Documentation
◆ uartflags_t
| typedef uint32_t uartflags_t |
UART driver condition flags type.
Definition at line 63 of file hal_uart_lld.h.
◆ UARTDriver
| typedef struct hal_uart_driver UARTDriver |
Type of structure representing an UART driver.
Definition at line 68 of file hal_uart_lld.h.
◆ uartcb_t
| typedef void(* uartcb_t) (UARTDriver *uartp) |
Generic UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
Definition at line 75 of file hal_uart_lld.h.
◆ uartccb_t
| typedef void(* uartccb_t) (UARTDriver *uartp, uint16_t c) |
Character received UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject triggering the callback[in] c received character
Definition at line 84 of file hal_uart_lld.h.
◆ uartecb_t
| typedef void(* uartecb_t) (UARTDriver *uartp, uartflags_t e) |
Receive error UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject triggering the callback[in] e receive error mask
Definition at line 93 of file hal_uart_lld.h.
◆ UARTConfig
| typedef struct hal_uart_config UARTConfig |
Driver configuration structure.
- Note
- Implementations may extend this structure to contain more, architecture dependent, fields.
Enumeration Type Documentation
◆ uartstate_t
| enum uartstate_t |
Driver state machine possible states.
| Enumerator | |
|---|---|
| UART_UNINIT | Not initialized. |
| UART_STOP | Stopped. |
| UART_READY | Ready. |
Definition at line 89 of file hal_uart.h.
◆ uarttxstate_t
| enum uarttxstate_t |
Transmitter state machine states.
| Enumerator | |
|---|---|
| UART_TX_IDLE | Not transmitting. |
| UART_TX_ACTIVE | Transmitting. |
Definition at line 98 of file hal_uart.h.
◆ uartrxstate_t
| enum uartrxstate_t |
Receiver state machine states.
| Enumerator | |
|---|---|
| UART_RX_IDLE | Not receiving. |
| UART_RX_ACTIVE | Receiving. |
Definition at line 106 of file hal_uart.h.
Function Documentation
◆ uartInit()
| void uartInit | ( | void | ) |
UART Driver initialization.
- Note
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:
- Object or module nitializer function.
Definition at line 56 of file hal_uart.c.
References uart_lld_init().
Referenced by halInit().

◆ uartObjectInit()
| void uartObjectInit | ( | UARTDriver * | uartp | ) |
Initializes the standard part of a UARTDriver structure.
- Parameters
-
[out] uartp pointer to the UARTDriverobject
- Function Class:
- Object or module nitializer function.
Definition at line 68 of file hal_uart.c.
References hal_uart_driver::config, hal_uart_driver::early, hal_uart_driver::mutex, osalMutexObjectInit(), hal_uart_driver::rxstate, hal_uart_driver::state, hal_uart_driver::threadrx, hal_uart_driver::threadtx, hal_uart_driver::txstate, UART_RX_IDLE, UART_STOP, and UART_TX_IDLE.
Referenced by uart_lld_init().

◆ uartStart()
| msg_t uartStart | ( | UARTDriver * | uartp, |
| const UARTConfig * | config ) |
Configures and activates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] config pointer to the UARTConfigobject
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 98 of file hal_uart.c.
References hal_uart_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::state, uart_lld_start(), UART_READY, and UART_STOP.
◆ uartStop()
| void uartStop | ( | UARTDriver * | uartp | ) |
Deactivates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 135 of file hal_uart.c.
References hal_uart_driver::config, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::rxstate, hal_uart_driver::state, hal_uart_driver::txstate, uart_lld_stop(), UART_READY, UART_RX_IDLE, UART_STOP, and UART_TX_IDLE.
◆ uartStartSend()
| void uartStartSend | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| const void * | txbuf ) |
Starts a transmission on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to send [in] txbuf the pointer to the transmit buffer
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 164 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::state, hal_uart_driver::txstate, uart_lld_start_send(), UART_READY, and UART_TX_ACTIVE.
◆ uartStartSendI()
| void uartStartSendI | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| const void * | txbuf ) |
Starts a transmission on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- This function has to be invoked from a lock zone.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to send [in] txbuf the pointer to the transmit buffer
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 189 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_uart_driver::state, hal_uart_driver::txstate, uart_lld_start_send(), UART_READY, and UART_TX_ACTIVE.

◆ uartStopSend()
| size_t uartStopSend | ( | UARTDriver * | uartp | ) |
Stops any ongoing transmission.
- Note
- Stopping a transmission also suppresses the transmission callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not transmitted by the stopped transmit operation.
- Return values
-
UART_ERR_NOT_ACTIVE if there was no transmit operation in progress.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 212 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::state, hal_uart_driver::txstate, UART_ERR_NOT_ACTIVE, uart_lld_stop_send(), UART_READY, UART_TX_ACTIVE, and UART_TX_IDLE.
◆ uartStopSendI()
| size_t uartStopSendI | ( | UARTDriver * | uartp | ) |
Stops any ongoing transmission.
- Note
- Stopping a transmission also suppresses the transmission callbacks.
- This function has to be invoked from a lock zone.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not transmitted by the stopped transmit operation.
- Return values
-
UART_ERR_NOT_ACTIVE if there was no transmit operation in progress.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 245 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_uart_driver::state, hal_uart_driver::txstate, UART_ERR_NOT_ACTIVE, uart_lld_stop_send(), UART_READY, UART_TX_ACTIVE, and UART_TX_IDLE.
Referenced by uartSendFullTimeout(), and uartSendTimeout().

◆ uartStartReceive()
| void uartStartReceive | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| void * | rxbuf ) |
Starts a receive operation on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to receive [in] rxbuf the pointer to the receive buffer
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 270 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::rxstate, hal_uart_driver::state, uart_lld_start_receive(), UART_READY, and UART_RX_ACTIVE.
◆ uartStartReceiveI()
| void uartStartReceiveI | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| void * | rxbuf ) |
Starts a receive operation on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- This function has to be invoked from a lock zone.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to receive [out] rxbuf the pointer to the receive buffer
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 295 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_uart_driver::rxstate, hal_uart_driver::state, uart_lld_start_receive(), UART_READY, and UART_RX_ACTIVE.

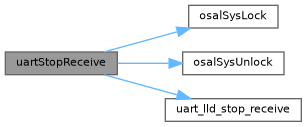
◆ uartStopReceive()
| size_t uartStopReceive | ( | UARTDriver * | uartp | ) |
Stops any ongoing receive operation.
- Note
- Stopping a receive operation also suppresses the receive callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not received by the stopped receive operation.
- Return values
-
UART_ERR_NOT_ACTIVE if there was no receive operation in progress.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 318 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), hal_uart_driver::rxstate, hal_uart_driver::state, UART_ERR_NOT_ACTIVE, uart_lld_stop_receive(), UART_READY, UART_RX_ACTIVE, and UART_RX_IDLE.
◆ uartStopReceiveI()
| size_t uartStopReceiveI | ( | UARTDriver * | uartp | ) |
Stops any ongoing receive operation.
- Note
- Stopping a receive operation also suppresses the receive callbacks.
- This function has to be invoked from a lock zone.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not received by the stopped receive operation.
- Return values
-
UART_ERR_NOT_ACTIVE if there was no receive operation in progress.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 351 of file hal_uart.c.
References osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_uart_driver::rxstate, hal_uart_driver::state, UART_ERR_NOT_ACTIVE, uart_lld_stop_receive(), UART_READY, UART_RX_ACTIVE, and UART_RX_IDLE.
Referenced by uartReceiveTimeout().

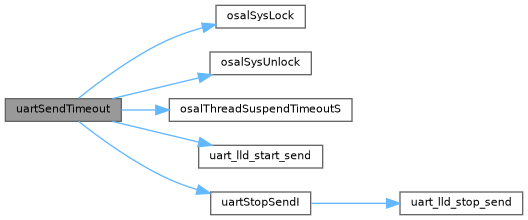
◆ uartSendTimeout()
| msg_t uartSendTimeout | ( | UARTDriver * | uartp, |
| size_t * | np, | ||
| const void * | txbuf, | ||
| sysinterval_t | timeout ) |
Performs a transmission on the UART peripheral.
- Note
- The function returns when the specified number of frames have been sent to the UART or on timeout.
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- This function implements a software timeout, it does not use any underlying HW timeout mechanism.
- If the configured callback starts another transmission before this function returns then the behavior is undefined.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in,out] np number of data frames to transmit, on exit the number of frames actually transmitted [in] txbuf the pointer to the transmit buffer [in] timeout operation timeout
- Returns
- The operation status.
- Return values
-
MSG_OK if the operation completed successfully. MSG_TIMEOUT if the operation timed out.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 388 of file hal_uart.c.
References hal_uart_driver::early, MSG_OK, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), osalThreadSuspendTimeoutS(), hal_uart_driver::state, hal_uart_driver::threadtx, hal_uart_driver::txstate, uart_lld_start_send(), UART_READY, UART_TX_ACTIVE, and uartStopSendI().
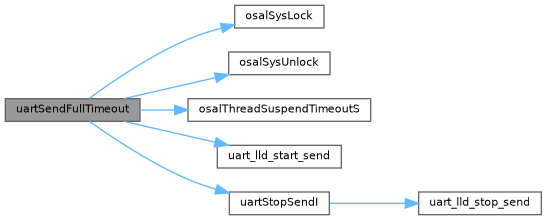
◆ uartSendFullTimeout()
| msg_t uartSendFullTimeout | ( | UARTDriver * | uartp, |
| size_t * | np, | ||
| const void * | txbuf, | ||
| sysinterval_t | timeout ) |
Performs a transmission on the UART peripheral.
- Note
- The function returns when the specified number of frames have been physically transmitted or on timeout.
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- This function implements a software timeout, it does not use any underlying HW timeout mechanism.
- If the configured callback starts another transmission before this function returns then the behavior is undefined.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in,out] np number of data frames to transmit, on exit the number of frames actually transmitted [in] txbuf the pointer to the transmit buffer [in] timeout operation timeout
- Returns
- The operation status.
- Return values
-
MSG_OK if the operation completed successfully. MSG_TIMEOUT if the operation timed out.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 435 of file hal_uart.c.
References hal_uart_driver::early, MSG_OK, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), osalThreadSuspendTimeoutS(), hal_uart_driver::state, hal_uart_driver::threadtx, hal_uart_driver::txstate, uart_lld_start_send(), UART_READY, UART_TX_ACTIVE, and uartStopSendI().
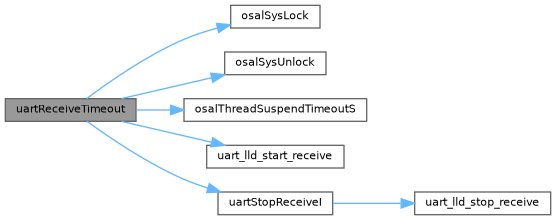
◆ uartReceiveTimeout()
| msg_t uartReceiveTimeout | ( | UARTDriver * | uartp, |
| size_t * | np, | ||
| void * | rxbuf, | ||
| sysinterval_t | timeout ) |
Performs a receive operation on the UART peripheral.
- Note
- The function returns when the specified number of frames have been received or on error/timeout.
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- This function implements a software timeout, it does not use any underlying HW timeout mechanism.
- If the configured callback starts another receive operation before this function returns then the behavior is undefined.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in,out] np number of data frames to receive, on exit the number of frames actually received [in] rxbuf the pointer to the receive buffer [in] timeout operation timeout
- Returns
- The operation status.
- Return values
-
MSG_OK if the operation completed successfully. MSG_TIMEOUT if the operation timed out. MSG_RESET in case of a receive error.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 484 of file hal_uart.c.
References MSG_OK, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), osalThreadSuspendTimeoutS(), hal_uart_driver::rxstate, hal_uart_driver::state, hal_uart_driver::threadrx, uart_lld_start_receive(), UART_READY, UART_RX_ACTIVE, and uartStopReceiveI().
◆ uartAcquireBus()
| void uartAcquireBus | ( | UARTDriver * | uartp | ) |
Gains exclusive access to the UART bus.
This function tries to gain ownership to the UART bus, if the bus is already being used then the invoking thread is queued.
- Precondition
- In order to use this function the option
UART_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 521 of file hal_uart.c.
References hal_uart_driver::mutex, osalDbgCheck, and osalMutexLock().

◆ uartReleaseBus()
| void uartReleaseBus | ( | UARTDriver * | uartp | ) |
Releases exclusive access to the UART bus.
- Precondition
- In order to use this function the option
UART_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 537 of file hal_uart.c.
References hal_uart_driver::mutex, osalDbgCheck, and osalMutexUnlock().

◆ uart_lld_init()
| void uart_lld_init | ( | void | ) |
Low level UART driver initialization.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 65 of file hal_uart_lld.c.
References UARTD1, and uartObjectInit().
Referenced by uartInit().

◆ uart_lld_start()
| void uart_lld_start | ( | UARTDriver * | uartp | ) |
Configures and activates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 80 of file hal_uart_lld.c.
References hal_uart_driver::state, UART_STOP, and UARTD1.
Referenced by uartStart().
◆ uart_lld_stop()
| void uart_lld_stop | ( | UARTDriver * | uartp | ) |
Deactivates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 101 of file hal_uart_lld.c.
References hal_uart_driver::state, UART_READY, and UARTD1.
Referenced by uartStop().
◆ uart_lld_start_send()
| void uart_lld_start_send | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| const void * | txbuf ) |
Starts a transmission on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to send [in] txbuf the pointer to the transmit buffer
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 126 of file hal_uart_lld.c.
Referenced by uartSendFullTimeout(), uartSendTimeout(), uartStartSend(), and uartStartSendI().
◆ uart_lld_stop_send()
| size_t uart_lld_stop_send | ( | UARTDriver * | uartp | ) |
Stops any ongoing transmission.
- Note
- Stopping a transmission also suppresses the transmission callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not transmitted by the stopped transmit operation.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 145 of file hal_uart_lld.c.
Referenced by uartStopSend(), and uartStopSendI().
◆ uart_lld_start_receive()
| void uart_lld_start_receive | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| void * | rxbuf ) |
Starts a receive operation on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to receive [out] rxbuf the pointer to the receive buffer
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 163 of file hal_uart_lld.c.
Referenced by uartReceiveTimeout(), uartStartReceive(), and uartStartReceiveI().
◆ uart_lld_stop_receive()
| size_t uart_lld_stop_receive | ( | UARTDriver * | uartp | ) |
Stops any ongoing receive operation.
- Note
- Stopping a receive operation also suppresses the receive callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not received by the stopped receive operation.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 182 of file hal_uart_lld.c.
Referenced by uartStopReceive(), and uartStopReceiveI().
Variable Documentation
◆ UARTD1
| UARTDriver UARTD1 |
UART1 driver identifier.
Definition at line 41 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().