Generic SPI Driver. More...
Detailed Description
Generic SPI Driver.
This module implements a generic SPI (Serial Peripheral Interface) driver allowing bidirectional and monodirectional transfers, complex atomic transactions are supported as well.
- Precondition
- In order to use the SPI driver the
HAL_USE_SPIoption must be enabled inhalconf.h.
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment, any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).
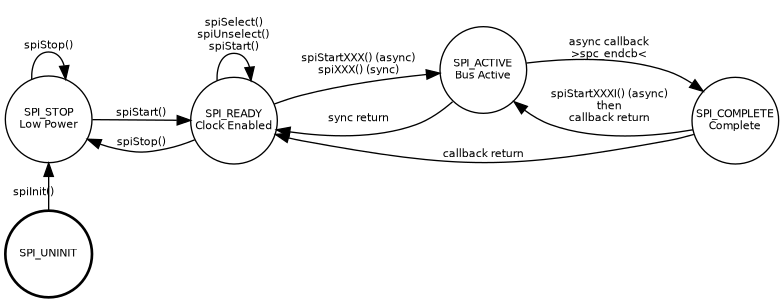
The driver is not thread safe for performance reasons, if you need to access the SPI bus from multiple threads then use the spiAcquireBus() and spiReleaseBus() APIs in order to gain exclusive access.

Chip Select modes | |
| #define | SPI_SELECT_MODE_NONE |
| #define | SPI_SELECT_MODE_PAD 1 /** @brief Legacy mode. */ |
| #define | SPI_SELECT_MODE_PORT 2 /** @brief Fastest mode. */ |
| #define | SPI_SELECT_MODE_LINE 3 /** @brief Packed mode. */ |
| #define | SPI_SELECT_MODE_LLD 4 /** @brief LLD-defined mode.*/ |
SPI configuration options | |
| #define | SPI_USE_SYNCHRONIZATION FALSE |
| Support for thread synchronization API. | |
| #define | SPI_USE_ASSERT_ON_ERROR TRUE |
| Inserts an assertion on function errors before returning. | |
| #define | SPI_USE_MUTUAL_EXCLUSION TRUE |
Enables the spiAcquireBus() and spiReleaseBus() APIs. | |
| #define | SPI_SELECT_MODE SPI_SELECT_MODE_PAD |
| Handling method for SPI CS line. | |
Macro Functions | |
| #define | spiIsBufferComplete(spip) |
| Buffer state. | |
| #define | spiSelectI(spip) |
| Asserts the slave select signal and prepares for transfers. | |
| #define | spiUnselectI(spip) |
| Deasserts the slave select signal. | |
| #define | spiPolledExchange(spip, frame) |
| Exchanges one frame using a polled wait. | |
| #define | spiAbortI(spip) |
| Compatibility API with SPI driver v1. | |
| #define | spiAbort(spip) |
| Compatibility API with SPI driver v1. | |
Low level driver helper macros | |
| #define | __spi_wakeup_isr(spip, msg) |
| Wakes up the waiting thread. | |
| #define | __spi_isr_complete_code(spip) |
| Common ISR code in linear mode. | |
| #define | __spi_isr_half_code(spip) |
| Half buffer filled ISR code in circular mode. | |
| #define | __spi_isr_full_code(spip) |
| Full buffer filled ISR code in circular mode. | |
| #define | __spi_isr_error_code(spip, msg) |
| ISR error reporting code.. | |
PLATFORM configuration options | |
| #define | PLATFORM_SPI_USE_SPI1 FALSE |
| SPI1 driver enable switch. | |
Data Structures | |
| struct | hal_spi_config |
| Driver configuration structure. More... | |
| struct | hal_spi_driver |
| Structure representing an SPI driver. More... | |
Macros | |
| #define | SPI_SUPPORTS_CIRCULAR TRUE |
| Circular mode support flag. | |
| #define | SPI_SUPPORTS_SLAVE_MODE TRUE |
| Slave mode support flag. | |
| #define | spi_lld_driver_fields |
| Low level fields of the SPI driver structure. | |
| #define | spi_lld_config_fields |
| Low level fields of the SPI configuration structure. | |
Typedefs | |
| typedef struct hal_spi_driver | SPIDriver |
| Type of a structure representing an SPI driver. | |
| typedef struct hal_spi_config | SPIConfig |
| Type of a SPI driver configuration structure. | |
| typedef void(* | spicb_t) (SPIDriver *spip) |
| SPI notification callback type. | |
Enumerations | |
| enum | spistate_t { SPI_UNINIT = 0 , SPI_STOP = 1 , SPI_READY = 2 , SPI_ACTIVE = 3 , SPI_COMPLETE = 4 } |
| Driver state machine possible states. More... | |
Functions | |
| void | spiInit (void) |
| SPI Driver initialization. | |
| void | spiObjectInit (SPIDriver *spip) |
Initializes the standard part of a SPIDriver structure. | |
| msg_t | spiStart (SPIDriver *spip, const SPIConfig *config) |
| Configures and activates the SPI peripheral. | |
| void | spiStop (SPIDriver *spip) |
| Deactivates the SPI peripheral. | |
| void | spiSelect (SPIDriver *spip) |
| Asserts the slave select signal and prepares for transfers. | |
| void | spiUnselect (SPIDriver *spip) |
| Deasserts the slave select signal. | |
| msg_t | spiStartIgnoreI (SPIDriver *spip, size_t n) |
| Ignores data on the SPI bus. | |
| msg_t | spiStartIgnore (SPIDriver *spip, size_t n) |
| Ignores data on the SPI bus. | |
| msg_t | spiStartExchangeI (SPIDriver *spip, size_t n, const void *txbuf, void *rxbuf) |
| Exchanges data on the SPI bus. | |
| msg_t | spiStartExchange (SPIDriver *spip, size_t n, const void *txbuf, void *rxbuf) |
| Exchanges data on the SPI bus. | |
| msg_t | spiStartSendI (SPIDriver *spip, size_t n, const void *txbuf) |
| Sends data over the SPI bus. | |
| msg_t | spiStartSend (SPIDriver *spip, size_t n, const void *txbuf) |
| Sends data over the SPI bus. | |
| msg_t | spiStartReceiveI (SPIDriver *spip, size_t n, void *rxbuf) |
| Receives data from the SPI bus. | |
| msg_t | spiStartReceive (SPIDriver *spip, size_t n, void *rxbuf) |
| Receives data from the SPI bus. | |
| msg_t | spiStopTransferI (SPIDriver *spip, size_t *sizep) |
| Stops the ongoing SPI operation. | |
| msg_t | spiStopTransfer (SPIDriver *spip, size_t *sizep) |
| Stops the ongoing SPI operation, if any. | |
| msg_t | spiSynchronizeS (SPIDriver *spip, sysinterval_t timeout) |
| Synchronizes with current transfer completion. | |
| msg_t | spiSynchronize (SPIDriver *spip, sysinterval_t timeout) |
| Synchronizes with current transfer completion. | |
| msg_t | spiIgnore (SPIDriver *spip, size_t n) |
| Ignores data on the SPI bus. | |
| msg_t | spiExchange (SPIDriver *spip, size_t n, const void *txbuf, void *rxbuf) |
| Exchanges data on the SPI bus. | |
| msg_t | spiSend (SPIDriver *spip, size_t n, const void *txbuf) |
| Sends data over the SPI bus. | |
| msg_t | spiReceive (SPIDriver *spip, size_t n, void *rxbuf) |
| Receives data from the SPI bus. | |
| void | spiAcquireBus (SPIDriver *spip) |
| Gains exclusive access to the SPI bus. | |
| void | spiReleaseBus (SPIDriver *spip) |
| Releases exclusive access to the SPI bus. | |
| void | spi_lld_init (void) |
| Low level SPI driver initialization. | |
| msg_t | spi_lld_start (SPIDriver *spip) |
| Configures and activates the SPI peripheral. | |
| void | spi_lld_stop (SPIDriver *spip) |
| Deactivates the SPI peripheral. | |
| void | spi_lld_select (SPIDriver *spip) |
| Asserts the slave select signal and prepares for transfers. | |
| void | spi_lld_unselect (SPIDriver *spip) |
| Deasserts the slave select signal. | |
| msg_t | spi_lld_ignore (SPIDriver *spip, size_t n) |
| Ignores data on the SPI bus. | |
| msg_t | spi_lld_exchange (SPIDriver *spip, size_t n, const void *txbuf, void *rxbuf) |
| Exchanges data on the SPI bus. | |
| msg_t | spi_lld_send (SPIDriver *spip, size_t n, const void *txbuf) |
| Sends data over the SPI bus. | |
| msg_t | spi_lld_receive (SPIDriver *spip, size_t n, void *rxbuf) |
| Receives data from the SPI bus. | |
| msg_t | spi_lld_stop_transfer (SPIDriver *spip, size_t *sizep) |
| Aborts the ongoing SPI operation, if any. | |
| uint16_t | spi_lld_polled_exchange (SPIDriver *spip, uint16_t frame) |
| Exchanges one frame using a polled wait. | |
Variables | |
| SPIDriver | SPID1 |
| SPI1 driver identifier. | |
Macro Definition Documentation
◆ SPI_SELECT_MODE_NONE
| #define SPI_SELECT_MODE_NONE |
Definition at line 38 of file hal_spi_v2.h.
◆ SPI_SELECT_MODE_PAD
| #define SPI_SELECT_MODE_PAD 1 /** @brief Legacy mode. */ |
Definition at line 39 of file hal_spi_v2.h.
◆ SPI_SELECT_MODE_PORT
| #define SPI_SELECT_MODE_PORT 2 /** @brief Fastest mode. */ |
Definition at line 40 of file hal_spi_v2.h.
◆ SPI_SELECT_MODE_LINE
| #define SPI_SELECT_MODE_LINE 3 /** @brief Packed mode. */ |
Definition at line 41 of file hal_spi_v2.h.
◆ SPI_SELECT_MODE_LLD
| #define SPI_SELECT_MODE_LLD 4 /** @brief LLD-defined mode.*/ |
Definition at line 42 of file hal_spi_v2.h.
◆ SPI_USE_SYNCHRONIZATION
| #define SPI_USE_SYNCHRONIZATION FALSE |
Support for thread synchronization API.
Definition at line 58 of file hal_spi_v2.h.
◆ SPI_USE_ASSERT_ON_ERROR
| #define SPI_USE_ASSERT_ON_ERROR TRUE |
Inserts an assertion on function errors before returning.
Definition at line 68 of file hal_spi_v2.h.
◆ SPI_USE_MUTUAL_EXCLUSION
| #define SPI_USE_MUTUAL_EXCLUSION TRUE |
Enables the spiAcquireBus() and spiReleaseBus() APIs.
- Note
- Disabling this option saves both code and data space.
Definition at line 76 of file hal_spi_v2.h.
◆ SPI_SELECT_MODE
| #define SPI_SELECT_MODE SPI_SELECT_MODE_PAD |
Handling method for SPI CS line.
- Note
- Disabling this option saves both code and data space.
Definition at line 84 of file hal_spi_v2.h.
◆ spiIsBufferComplete
| #define spiIsBufferComplete | ( | spip | ) |
Buffer state.
- Note
- This function is meant to be called from the SPI callback only.
- This state is only meaningful for circular transfers, where it is used to distinguish the full buffer callback from the half buffer callback.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Returns
- The buffer state.
- Return values
-
false if the driver filled/sent the first half of the buffer. true if the driver filled/sent the second half of the buffer.
- Function Class:
- Special function, this function has special requirements see the notes.
Definition at line 274 of file hal_spi_v2.h.
◆ spiSelectI
| #define spiSelectI | ( | spip | ) |
Asserts the slave select signal and prepares for transfers.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 284 of file hal_spi_v2.h.
◆ spiUnselectI
| #define spiUnselectI | ( | spip | ) |
Deasserts the slave select signal.
The previously selected peripheral is unselected.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 297 of file hal_spi_v2.h.
◆ spiPolledExchange
| #define spiPolledExchange | ( | spip, | |
| frame ) |
Exchanges one frame using a polled wait.
This synchronous function exchanges one frame using a polled synchronization method. This function is useful when exchanging small amount of data on high speed channels, usually in this situation is much more efficient just wait for completion using polling than suspending the thread waiting for an interrupt.
- Note
- This API is implemented as a macro in order to minimize latency.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] frame the data frame to send over the SPI bus
- Returns
- The received data frame from the SPI bus.
Definition at line 354 of file hal_spi_v2.h.
◆ spiAbortI
| #define spiAbortI | ( | spip | ) |
Compatibility API with SPI driver v1.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 363 of file hal_spi_v2.h.
Referenced by spiAbort().
◆ spiAbort
| #define spiAbort | ( | spip | ) |
Compatibility API with SPI driver v1.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 372 of file hal_spi_v2.h.
◆ __spi_wakeup_isr
| #define __spi_wakeup_isr | ( | spip, | |
| msg ) |
Wakes up the waiting thread.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] msg wakeup message
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 388 of file hal_spi_v2.h.
◆ __spi_isr_complete_code
| #define __spi_isr_complete_code | ( | spip | ) |
Common ISR code in linear mode.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 411 of file hal_spi_v2.h.
◆ __spi_isr_half_code
| #define __spi_isr_half_code | ( | spip | ) |
Half buffer filled ISR code in circular mode.
This code handles the portable part of the ISR code:
- Callback invocation.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 431 of file hal_spi_v2.h.
◆ __spi_isr_full_code
| #define __spi_isr_full_code | ( | spip | ) |
Full buffer filled ISR code in circular mode.
This code handles the portable part of the ISR code:
- Callback invocation.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 450 of file hal_spi_v2.h.
◆ __spi_isr_error_code
| #define __spi_isr_error_code | ( | spip, | |
| msg ) |
ISR error reporting code..
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] msg error code
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 470 of file hal_spi_v2.h.
◆ SPI_SUPPORTS_CIRCULAR
| #define SPI_SUPPORTS_CIRCULAR TRUE |
Circular mode support flag.
Definition at line 37 of file hal_spi_v2_lld.h.
◆ SPI_SUPPORTS_SLAVE_MODE
| #define SPI_SUPPORTS_SLAVE_MODE TRUE |
Slave mode support flag.
Definition at line 42 of file hal_spi_v2_lld.h.
◆ PLATFORM_SPI_USE_SPI1
| #define PLATFORM_SPI_USE_SPI1 FALSE |
SPI1 driver enable switch.
If set to TRUE the support for SPI1 is included.
- Note
- The default is
FALSE.
Definition at line 58 of file hal_spi_v2_lld.h.
◆ spi_lld_driver_fields
| #define spi_lld_driver_fields |
Low level fields of the SPI driver structure.
Definition at line 77 of file hal_spi_v2_lld.h.
◆ spi_lld_config_fields
| #define spi_lld_config_fields |
Low level fields of the SPI configuration structure.
Definition at line 84 of file hal_spi_v2_lld.h.
Typedef Documentation
◆ SPIDriver
| typedef struct hal_spi_driver SPIDriver |
Type of a structure representing an SPI driver.
Definition at line 127 of file hal_spi_v2.h.
◆ SPIConfig
| typedef struct hal_spi_config SPIConfig |
Type of a SPI driver configuration structure.
Definition at line 132 of file hal_spi_v2.h.
◆ spicb_t
| typedef void(* spicb_t) (SPIDriver *spip) |
SPI notification callback type.
The callback is invoked from ISR context.
- Parameters
-
[in] spip pointer to the SPIDriverobject triggering the callback
Definition at line 141 of file hal_spi_v2.h.
Enumeration Type Documentation
◆ spistate_t
| enum spistate_t |
Driver state machine possible states.
| Enumerator | |
|---|---|
| SPI_UNINIT | Not initialized. |
| SPI_STOP | Stopped. |
| SPI_READY | Ready. |
| SPI_ACTIVE | Exchanging data. |
| SPI_COMPLETE | Asynchronous operation complete. |
Definition at line 116 of file hal_spi_v2.h.
Function Documentation
◆ spiInit()
| void spiInit | ( | void | ) |
SPI Driver initialization.
- Note
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:
- Object or module nitializer function.
Definition at line 54 of file hal_spi_v2.inc.
References spi_lld_init().

◆ spiObjectInit()
| void spiObjectInit | ( | SPIDriver * | spip | ) |
Initializes the standard part of a SPIDriver structure.
- Parameters
-
[out] spip pointer to the SPIDriverobject
- Function Class:
- Object or module nitializer function.
Definition at line 66 of file hal_spi_v2.inc.
References hal_spi_driver::config, hal_spi_driver::mutex, osalMutexObjectInit(), SPI_STOP, hal_spi_driver::state, and hal_spi_driver::sync_transfer.

◆ spiStart()
Configures and activates the SPI peripheral.
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 90 of file hal_spi_v2.inc.
References hal_spi_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), spi_lld_start(), SPI_READY, SPI_STOP, and hal_spi_driver::state.
◆ spiStop()
| void spiStop | ( | SPIDriver * | spip | ) |
Deactivates the SPI peripheral.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 125 of file hal_spi_v2.inc.
References hal_spi_driver::config, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), spi_lld_stop(), SPI_READY, SPI_STOP, and hal_spi_driver::state.
◆ spiSelect()
| void spiSelect | ( | SPIDriver * | spip | ) |
Asserts the slave select signal and prepares for transfers.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 148 of file hal_spi_v2.inc.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), SPI_READY, spiSelectI, and hal_spi_driver::state.
◆ spiUnselect()
| void spiUnselect | ( | SPIDriver * | spip | ) |
Deasserts the slave select signal.
The previously selected peripheral is unselected.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 166 of file hal_spi_v2.inc.
References osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), SPI_READY, spiUnselectI, and hal_spi_driver::state.
◆ spiStartIgnoreI()
Ignores data on the SPI bus.
This asynchronous function starts the transmission of a series of idle words on the SPI bus and ignores the received data.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be ignored
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 190 of file hal_spi_v2.inc.
References hal_spi_config::circular, hal_spi_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, SPI_ACTIVE, spi_lld_ignore(), SPI_READY, and hal_spi_driver::state.

◆ spiStartIgnore()
Ignores data on the SPI bus.
This asynchronous function starts the transmission of a series of idle words on the SPI bus and ignores the received data.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be ignored
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 226 of file hal_spi_v2.inc.
References osalSysLock(), osalSysUnlock(), and spiStartIgnoreI.
◆ spiStartExchangeI()
Exchanges data on the SPI bus.
This asynchronous function starts a simultaneous transmit/receive operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be exchanged [in] txbuf the pointer to the transmit buffer [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 254 of file hal_spi_v2.inc.
References hal_spi_config::circular, hal_spi_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, SPI_ACTIVE, spi_lld_exchange(), SPI_READY, and hal_spi_driver::state.

◆ spiStartExchange()
Exchanges data on the SPI bus.
This asynchronous function starts a simultaneous transmit/receive operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be exchanged [in] txbuf the pointer to the transmit buffer [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 296 of file hal_spi_v2.inc.
References osalSysLock(), osalSysUnlock(), and spiStartExchangeI.
◆ spiStartSendI()
Sends data over the SPI bus.
This asynchronous function starts a transmit operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to send [in] txbuf the pointer to the transmit buffer
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 323 of file hal_spi_v2.inc.
References hal_spi_config::circular, hal_spi_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, SPI_ACTIVE, spi_lld_send(), SPI_READY, and hal_spi_driver::state.

◆ spiStartSend()
Sends data over the SPI bus.
This asynchronous function starts a transmit operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to send [in] txbuf the pointer to the transmit buffer
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 361 of file hal_spi_v2.inc.
References osalSysLock(), osalSysUnlock(), and spiStartSendI.
◆ spiStartReceiveI()
Receives data from the SPI bus.
This asynchronous function starts a receive operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to receive [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 387 of file hal_spi_v2.inc.
References hal_spi_config::circular, hal_spi_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, SPI_ACTIVE, spi_lld_receive(), SPI_READY, and hal_spi_driver::state.

◆ spiStartReceive()
Receives data from the SPI bus.
This asynchronous function starts a receive operation.
- Precondition
- A slave must have been selected using
spiSelect()orspiSelectI().
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to receive [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 425 of file hal_spi_v2.inc.
References osalSysLock(), osalSysUnlock(), and spiStartReceiveI.
◆ spiStopTransferI()
Stops the ongoing SPI operation.
- Parameters
-
[in] spip pointer to the SPIDriverobject[out] sizep pointer to the counter of frames not yet transferred or NULL
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 445 of file hal_spi_v2.inc.
References HAL_RET_SUCCESS, MSG_RESET, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, osalThreadResumeI(), SPI_ACTIVE, SPI_COMPLETE, spi_lld_stop_transfer(), SPI_READY, hal_spi_driver::state, and hal_spi_driver::sync_transfer.
Referenced by spiStopTransfer().
◆ spiStopTransfer()
Stops the ongoing SPI operation, if any.
- Parameters
-
[in] spip pointer to the SPIDriverobject[out] sizep pointer to the counter of frames not yet transferred or NULL
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 484 of file hal_spi_v2.inc.
References osalOsRescheduleS(), osalSysLock(), osalSysUnlock(), and spiStopTransferI().
◆ spiSynchronizeS()
| msg_t spiSynchronizeS | ( | SPIDriver * | spip, |
| sysinterval_t | timeout ) |
Synchronizes with current transfer completion.
- Note
- This function can only be called by a single thread at time.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] timeout synchronization timeout
- Returns
- The synchronization result.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- This is an S-Class API, this function can be invoked from within a system lock zone by threads only.
Definition at line 511 of file hal_spi_v2.inc.
References MSG_OK, osalDbgAssert, osalDbgCheck, osalThreadSuspendTimeoutS(), SPI_ACTIVE, SPI_READY, hal_spi_driver::state, and hal_spi_driver::sync_transfer.
Referenced by spiExchange(), spiIgnore(), spiReceive(), spiSend(), and spiSynchronize().

◆ spiSynchronize()
| msg_t spiSynchronize | ( | SPIDriver * | spip, |
| sysinterval_t | timeout ) |
Synchronizes with current transfer completion.
- Note
- This function can only be called by a single thread at time.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] timeout synchronization timeout
- Returns
- The synchronization result.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 541 of file hal_spi_v2.inc.
References osalSysLock(), osalSysUnlock(), and spiSynchronizeS().
◆ spiIgnore()
Ignores data on the SPI bus.
This synchronous function performs the transmission of a series of idle words on the SPI bus and ignores the received data.
- Precondition
- In order to use this function the option
SPI_USE_SYNCHRONIZATIONmust be enabled.
- Note
- If the configured callback starts another transfer before this function returns then the behavior is undefined.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be ignored
- Returns
- The operation status.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 569 of file hal_spi_v2.inc.
References MSG_OK, osalSysLock(), osalSysUnlock(), spiStartIgnoreI, spiSynchronizeS(), and TIME_INFINITE.
◆ spiExchange()
Exchanges data on the SPI bus.
This synchronous function performs a simultaneous transmit/receive operation.
- Precondition
- In order to use this function the option
SPI_USE_SYNCHRONIZATIONmust be enabled.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- If the configured callback starts another transfer before this function returns then the behavior is undefined.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be exchanged [in] txbuf the pointer to the transmit buffer [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 606 of file hal_spi_v2.inc.
References MSG_OK, osalSysLock(), osalSysUnlock(), spiStartExchangeI, spiSynchronizeS(), and TIME_INFINITE.
◆ spiSend()
Sends data over the SPI bus.
This synchronous function performs a transmit operation.
- Precondition
- In order to use this function the option
SPI_USE_SYNCHRONIZATIONmust be enabled.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- If the configured callback starts another transfer before this function returns then the behavior is undefined.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to send [in] txbuf the pointer to the transmit buffer
- Returns
- The operation status.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 642 of file hal_spi_v2.inc.
References MSG_OK, osalSysLock(), osalSysUnlock(), spiStartSendI, spiSynchronizeS(), and TIME_INFINITE.
◆ spiReceive()
Receives data from the SPI bus.
This synchronous function performs a receive operation.
- Precondition
- In order to use this function the option
SPI_USE_SYNCHRONIZATIONmust be enabled.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- If the configured callback starts another transfer before this function returns then the behavior is undefined.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to receive [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization timed out. MSG_RESET if the transfer has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 677 of file hal_spi_v2.inc.
References MSG_OK, osalSysLock(), osalSysUnlock(), spiStartReceiveI, spiSynchronizeS(), and TIME_INFINITE.
◆ spiAcquireBus()
| void spiAcquireBus | ( | SPIDriver * | spip | ) |
Gains exclusive access to the SPI bus.
This function tries to gain ownership to the SPI bus, if the bus is already being used then the invoking thread is queued.
- Precondition
- In order to use this function the option
SPI_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 705 of file hal_spi_v2.inc.
References hal_spi_driver::mutex, osalDbgCheck, and osalMutexLock().

◆ spiReleaseBus()
| void spiReleaseBus | ( | SPIDriver * | spip | ) |
Releases exclusive access to the SPI bus.
- Precondition
- In order to use this function the option
SPI_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 721 of file hal_spi_v2.inc.
References hal_spi_driver::mutex, osalDbgCheck, and osalMutexUnlock().

◆ spi_lld_init()
| void spi_lld_init | ( | void | ) |
Low level SPI driver initialization.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 65 of file hal_spi_v2_lld.c.
References SPID1, and spiObjectInit().

◆ spi_lld_start()
Configures and activates the SPI peripheral.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 81 of file hal_spi_v2_lld.c.
References HAL_RET_IS_INVALID, HAL_RET_SUCCESS, osalDbgAssert, SPI_STOP, SPID1, and hal_spi_driver::state.
◆ spi_lld_stop()
| void spi_lld_stop | ( | SPIDriver * | spip | ) |
Deactivates the SPI peripheral.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 111 of file hal_spi_v2_lld.c.
References osalDbgAssert, SPI_READY, SPID1, and hal_spi_driver::state.
◆ spi_lld_select()
| void spi_lld_select | ( | SPIDriver * | spip | ) |
Asserts the slave select signal and prepares for transfers.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 139 of file hal_spi_v2_lld.c.
◆ spi_lld_unselect()
| void spi_lld_unselect | ( | SPIDriver * | spip | ) |
Deasserts the slave select signal.
The previously selected peripheral is unselected.
- Parameters
-
[in] spip pointer to the SPIDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 152 of file hal_spi_v2_lld.c.
◆ spi_lld_ignore()
Ignores data on the SPI bus.
This synchronous function performs the transmission of a series of idle words on the SPI bus and ignores the received data.
- Precondition
- In order to use this function the option
SPI_USE_SYNCHRONIZATIONmust be enabled.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be ignored
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 171 of file hal_spi_v2_lld.c.
References HAL_RET_SUCCESS.
◆ spi_lld_exchange()
Exchanges data on the SPI bus.
This asynchronous function starts a simultaneous transmit/receive operation.
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to be exchanged [in] txbuf the pointer to the transmit buffer [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 195 of file hal_spi_v2_lld.c.
References HAL_RET_SUCCESS.
◆ spi_lld_send()
Sends data over the SPI bus.
This asynchronous function starts a transmit operation.
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to send [in] txbuf the pointer to the transmit buffer
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 220 of file hal_spi_v2_lld.c.
References HAL_RET_SUCCESS.
◆ spi_lld_receive()
Receives data from the SPI bus.
This asynchronous function starts a receive operation.
- Postcondition
- At the end of the operation the configured callback is invoked.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] n number of words to receive [out] rxbuf the pointer to the receive buffer
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 243 of file hal_spi_v2_lld.c.
References HAL_RET_SUCCESS.
◆ spi_lld_stop_transfer()
Aborts the ongoing SPI operation, if any.
- Parameters
-
[in] spip pointer to the SPIDriverobject[out] sizep pointer to the counter of frames not yet transferred or NULL
- Returns
- The operation status.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 262 of file hal_spi_v2_lld.c.
References HAL_RET_SUCCESS.
Referenced by spiStopTransferI().
◆ spi_lld_polled_exchange()
| uint16_t spi_lld_polled_exchange | ( | SPIDriver * | spip, |
| uint16_t | frame ) |
Exchanges one frame using a polled wait.
This synchronous function exchanges one frame using a polled synchronization method. This function is useful when exchanging small amount of data on high speed channels, usually in this situation is much more efficient just wait for completion using polling than suspending the thread waiting for an interrupt.
- Parameters
-
[in] spip pointer to the SPIDriverobject[in] frame the data frame to send over the SPI bus
- Returns
- The received data frame from the SPI bus.
Definition at line 282 of file hal_spi_v2_lld.c.
Variable Documentation
◆ SPID1
| SPIDriver SPID1 |
SPI1 driver identifier.
Definition at line 41 of file hal_spi_v2_lld.c.