Generic DAC Driver. More...
Detailed Description
Generic DAC Driver.
This module implements a generic DAC (Digital to Analog Converter) driver. DAC conversions are modeled as circular streaming operations; the full buffer callback marker is not a restart state.
- Precondition
- In order to use the DAC driver the
HAL_USE_DACoption must be enabled inhalconf.h.

DAC configuration options | |
| #define | DAC_USE_SYNCHRONIZATION FALSE |
| Support for thread synchronization API. | |
| #define | DAC_USE_MUTUAL_EXCLUSION TRUE |
Enables the dacAcquireBus() and dacReleaseBus() APIs. | |
Low level driver helper macros | |
| #define | dacIsBufferComplete(dacp) |
| Buffer state. | |
| #define | _dac_wait_s(dacp) |
| Waits for operation completion. | |
| #define | _dac_reset_i(dacp) |
| Resumes a thread waiting for a conversion completion. | |
| #define | _dac_reset_s(dacp) |
| Resumes a thread waiting for a conversion completion. | |
| #define | _dac_wakeup_isr(dacp) |
| Wakes up the waiting thread. | |
| #define | _dac_timeout_isr(dacp) |
| Wakes up the waiting thread with a timeout message. | |
| #define | _dac_isr_half_code(dacp) |
| Common ISR code, half buffer event. | |
| #define | _dac_isr_full_code(dacp) |
| Common ISR code, full buffer event. | |
| #define | _dac_isr_error_code(dacp, err) |
| Common ISR code, error event. | |
Configuration options | |
| #define | PLATFORM_DAC_USE_DAC1 FALSE |
| DAC1 CH1 driver enable switch. | |
Data Structures | |
| struct | hal_dac_conversion_group |
| DAC Conversion group structure. More... | |
| struct | hal_dac_config |
| Driver configuration structure. More... | |
| struct | hal_dac_driver |
| Structure representing a DAC driver. More... | |
Macros | |
| #define | DAC_MAX_CHANNELS 2 |
| Maximum number of DAC channels per unit. | |
| #define | dac_lld_driver_fields |
| Low level fields of the DAC driver structure. | |
| #define | dac_lld_config_fields |
| Low level fields of the DAC configuration structure. | |
| #define | dac_lld_conversion_group_fields |
| Low level fields of the DAC group configuration structure. | |
Typedefs | |
| typedef struct hal_dac_driver | DACDriver |
| Type of a structure representing an DAC driver. | |
| typedef struct hal_dac_config | DACConfig |
| Type of a structure representing an DAC driver configuration. | |
| typedef struct hal_dac_conversion_group | DACConversionGroup |
| Type of a DAC conversion group. | |
| typedef void(* | daccallback_t) (DACDriver *dacp) |
| DAC notification callback type. | |
| typedef void(* | dacerrorcallback_t) (DACDriver *dacp, dacerror_t err) |
| DAC error callback type. | |
| typedef uint32_t | dacchannel_t |
| Type of a DAC channel index. | |
| typedef uint16_t | dacsample_t |
| Type representing a DAC sample. | |
Enumerations | |
| enum | dacstate_t { DAC_UNINIT = 0 , DAC_STOP = 1 , DAC_READY = 2 , DAC_ACTIVE = 3 , DAC_COMPLETE = 4 , DAC_ERROR = 5 } |
| Driver state machine possible states. More... | |
| enum | dacerror_t { DAC_ERR_DMAFAILURE = 0 , DAC_ERR_UNDERFLOW = 1 } |
| Possible DAC failure causes. More... | |
Functions | |
| void | dacInit (void) |
| DAC Driver initialization. | |
| void | dacObjectInit (DACDriver *dacp) |
Initializes the standard part of a DACDriver structure. | |
| msg_t | dacStart (DACDriver *dacp, const DACConfig *config) |
| Configures and activates the DAC peripheral. | |
| void | dacStop (DACDriver *dacp) |
| Deactivates the DAC peripheral. | |
| msg_t | dacPutChannelX (DACDriver *dacp, dacchannel_t channel, dacsample_t sample) |
| Outputs a value directly on a DAC channel. | |
| msg_t | dacStartConversion (DACDriver *dacp, const DACConversionGroup *grpp, dacsample_t *samples, size_t depth) |
| Starts a DAC conversion. | |
| msg_t | dacStartConversionI (DACDriver *dacp, const DACConversionGroup *grpp, dacsample_t *samples, size_t depth) |
| Starts a DAC conversion. | |
| void | dacStopConversion (DACDriver *dacp) |
| Stops an ongoing conversion. | |
| void | dacStopConversionI (DACDriver *dacp) |
| Stops an ongoing conversion. | |
| msg_t | dacConvert (DACDriver *dacp, const DACConversionGroup *grpp, dacsample_t *samples, size_t depth) |
| Performs a DAC conversion. | |
| msg_t | dacSynchronizeS (DACDriver *dacp, sysinterval_t timeout) |
| Synchronize to a conversion completion. | |
| msg_t | dacSynchronize (DACDriver *dacp, sysinterval_t timeout) |
| Synchronize to a conversion completion. | |
| void | dacAcquireBus (DACDriver *dacp) |
| Gains exclusive access to the DAC bus. | |
| void | dacReleaseBus (DACDriver *dacp) |
| Releases exclusive access to the DAC bus. | |
| void | dac_lld_init (void) |
| Low level DAC driver initialization. | |
| void | dac_lld_start (DACDriver *dacp) |
| Configures and activates the DAC peripheral. | |
| void | dac_lld_stop (DACDriver *dacp) |
| Deactivates the DAC peripheral. | |
| void | dac_lld_put_channel (DACDriver *dacp, dacchannel_t channel, dacsample_t sample) |
| Outputs a value directly on a DAC channel. | |
| void | dac_lld_start_conversion (DACDriver *dacp) |
| Starts a DAC conversion. | |
| void | dac_lld_stop_conversion (DACDriver *dacp) |
| Stops an ongoing conversion. | |
Variables | |
| DACDriver | DACD1 |
| DAC1 driver identifier. | |
Macro Definition Documentation
◆ DAC_USE_SYNCHRONIZATION
| #define DAC_USE_SYNCHRONIZATION FALSE |
◆ DAC_USE_MUTUAL_EXCLUSION
| #define DAC_USE_MUTUAL_EXCLUSION TRUE |
Enables the dacAcquireBus() and dacReleaseBus() APIs.
- Note
- Disabling this option saves both code and data space.
◆ dacIsBufferComplete
| #define dacIsBufferComplete | ( | dacp | ) |
Buffer state.
- Note
- This function is meant to be called from the DAC callback only.
- This function is meaningful for circular conversion callbacks only.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Returns
- The buffer state.
- Return values
-
false if the driver filled/sent the first half of the buffer. true if the driver filled/sent the second half of the buffer.
- Function Class:
- Special function, this function has special requirements see the notes.
◆ _dac_wait_s
| #define _dac_wait_s | ( | dacp | ) |
Waits for operation completion.
This function waits for the driver to complete the current conversion cycle.
- Precondition
- An operation must be running while the function is invoked.
- Note
- No more than one thread can wait on a DAC driver using this function.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _dac_reset_i
| #define _dac_reset_i | ( | dacp | ) |
Resumes a thread waiting for a conversion completion.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 240 of file hal_dac.h.
Referenced by dacStopConversionI().
◆ _dac_reset_s
| #define _dac_reset_s | ( | dacp | ) |
Resumes a thread waiting for a conversion completion.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 249 of file hal_dac.h.
Referenced by dacStopConversion().
◆ _dac_wakeup_isr
| #define _dac_wakeup_isr | ( | dacp | ) |
◆ _dac_timeout_isr
| #define _dac_timeout_isr | ( | dacp | ) |
Wakes up the waiting thread with a timeout message.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _dac_isr_half_code
| #define _dac_isr_half_code | ( | dacp | ) |
Common ISR code, half buffer event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _dac_isr_full_code
| #define _dac_isr_full_code | ( | dacp | ) |
Common ISR code, full buffer event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Driver state transitions.
The DAC_COMPLETE state is used only as a transient full buffer callback marker during the ongoing circular conversion.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _dac_isr_error_code
| #define _dac_isr_error_code | ( | dacp, | |
| err ) |
Common ISR code, error event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread timeout signalling, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] err platform dependent error code
- Function Class:
- Not an API, this function is for internal use only.
◆ DAC_MAX_CHANNELS
| #define DAC_MAX_CHANNELS 2 |
Maximum number of DAC channels per unit.
Definition at line 37 of file hal_dac_lld.h.
Referenced by dacPutChannelX().
◆ PLATFORM_DAC_USE_DAC1
| #define PLATFORM_DAC_USE_DAC1 FALSE |
DAC1 CH1 driver enable switch.
If set to TRUE the support for DAC1 channel 1 is included.
- Note
- The default is
FALSE.
Definition at line 53 of file hal_dac_lld.h.
◆ dac_lld_driver_fields
| #define dac_lld_driver_fields |
Low level fields of the DAC driver structure.
Definition at line 92 of file hal_dac_lld.h.
◆ dac_lld_config_fields
| #define dac_lld_config_fields |
Low level fields of the DAC configuration structure.
Definition at line 99 of file hal_dac_lld.h.
◆ dac_lld_conversion_group_fields
| #define dac_lld_conversion_group_fields |
Low level fields of the DAC group configuration structure.
Definition at line 106 of file hal_dac_lld.h.
Typedef Documentation
◆ DACDriver
| typedef struct hal_dac_driver DACDriver |
◆ DACConfig
| typedef struct hal_dac_config DACConfig |
◆ DACConversionGroup
| typedef struct hal_dac_conversion_group DACConversionGroup |
◆ daccallback_t
| typedef void(* daccallback_t) (DACDriver *dacp) |
◆ dacerrorcallback_t
| typedef void(* dacerrorcallback_t) (DACDriver *dacp, dacerror_t err) |
◆ dacchannel_t
| typedef uint32_t dacchannel_t |
Type of a DAC channel index.
Definition at line 68 of file hal_dac_lld.h.
◆ dacsample_t
| typedef uint16_t dacsample_t |
Type representing a DAC sample.
Definition at line 73 of file hal_dac_lld.h.
Enumeration Type Documentation
◆ dacstate_t
| enum dacstate_t |
◆ dacerror_t
| enum dacerror_t |
Possible DAC failure causes.
- Note
- Error codes are architecture dependent and should not relied upon.
| Enumerator | |
|---|---|
| DAC_ERR_DMAFAILURE | DMA operations failure. |
| DAC_ERR_UNDERFLOW | DAC overflow condition. |
Definition at line 80 of file hal_dac_lld.h.
Function Documentation
◆ dacInit()
| void dacInit | ( | void | ) |
DAC Driver initialization.
- Note
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:
- Object or module nitializer function.
Definition at line 56 of file hal_dac.c.
References dac_lld_init().
Referenced by halInit().

◆ dacObjectInit()
| void dacObjectInit | ( | DACDriver * | dacp | ) |
Initializes the standard part of a DACDriver structure.
- Parameters
-
[out] dacp pointer to the DACDriverobject
- Function Class:
- Object or module nitializer function.
Definition at line 68 of file hal_dac.c.
References hal_dac_driver::config, DAC_STOP, hal_dac_driver::mutex, osalMutexObjectInit(), hal_dac_driver::state, and hal_dac_driver::thread.
Referenced by dac_lld_init().

◆ dacStart()
Configures and activates the DAC peripheral.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] config pointer to the DACConfigobject, it can beNULLif the low level driver implementation supports a default configuration
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 95 of file hal_dac.c.
References hal_dac_driver::config, dac_lld_start(), DAC_READY, DAC_STOP, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_dac_driver::state.
◆ dacStop()
| void dacStop | ( | DACDriver * | dacp | ) |
Deactivates the DAC peripheral.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 133 of file hal_dac.c.
References hal_dac_driver::config, dac_lld_stop(), DAC_READY, DAC_STOP, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_dac_driver::state.
◆ dacPutChannelX()
| msg_t dacPutChannelX | ( | DACDriver * | dacp, |
| dacchannel_t | channel, | ||
| dacsample_t | sample ) |
Outputs a value directly on a DAC channel.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] channel DAC channel number [in] sample value to be output
- Function Class:
- This is an X-Class API, this function can be invoked from any context.
Definition at line 158 of file hal_dac.c.
References DAC_ACTIVE, DAC_COMPLETE, dac_lld_put_channel(), DAC_MAX_CHANNELS, DAC_READY, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, and hal_dac_driver::state.

◆ dacStartConversion()
| msg_t dacStartConversion | ( | DACDriver * | dacp, |
| const DACConversionGroup * | grpp, | ||
| dacsample_t * | samples, | ||
| size_t | depth ) |
Starts a DAC conversion.
Starts an asynchronous conversion operation.
- Note
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially written into the buffer with no gaps.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] grpp pointer to a DACConversionGroupobject[in] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 192 of file hal_dac.c.
References dacStartConversionI(), HAL_RET_SUCCESS, osalSysLock(), and osalSysUnlock().
◆ dacStartConversionI()
| msg_t dacStartConversionI | ( | DACDriver * | dacp, |
| const DACConversionGroup * | grpp, | ||
| dacsample_t * | samples, | ||
| size_t | depth ) |
Starts a DAC conversion.
Starts an asynchronous conversion operation.
- Postcondition
- The callbacks associated to the conversion group will be invoked on buffer complete and error events.
- Note
- DAC conversions are circular/streaming operations, a new conversion can only be started after stopping the current one.
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially organised in the buffer with no gaps.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] grpp pointer to a DACConversionGroupobject[in] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Returns
- The operation status.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 230 of file hal_dac.c.
References DAC_ACTIVE, DAC_ERROR, dac_lld_start_conversion(), DAC_READY, hal_dac_driver::depth, hal_dac_driver::grpp, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_dac_driver::samples, and hal_dac_driver::state.
Referenced by dacConvert(), and dacStartConversion().

◆ dacStopConversion()
| void dacStopConversion | ( | DACDriver * | dacp | ) |
Stops an ongoing conversion.
This function stops the currently ongoing conversion and returns the driver in the DAC_READY state. If there was no conversion being processed then the function does nothing.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 273 of file hal_dac.c.
References _dac_reset_s, DAC_ACTIVE, dac_lld_stop_conversion(), DAC_READY, hal_dac_driver::grpp, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_dac_driver::state.
◆ dacStopConversionI()
| void dacStopConversionI | ( | DACDriver * | dacp | ) |
Stops an ongoing conversion.
This function stops the currently ongoing conversion and returns the driver in the DAC_READY state. If there was no conversion being processed then the function does nothing.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 303 of file hal_dac.c.
References _dac_reset_i, DAC_ACTIVE, DAC_COMPLETE, dac_lld_stop_conversion(), DAC_READY, hal_dac_driver::grpp, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, and hal_dac_driver::state.

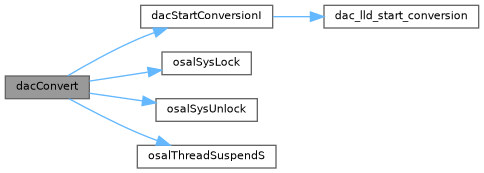
◆ dacConvert()
| msg_t dacConvert | ( | DACDriver * | dacp, |
| const DACConversionGroup * | grpp, | ||
| dacsample_t * | samples, | ||
| size_t | depth ) |
Performs a DAC conversion.
Performs a synchronous conversion operation.
- Note
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially organised in the buffer with no gaps.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] grpp pointer to a DACConversionGroupobject[in] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Returns
- The operation result.
- Return values
-
MSG_OK Conversion finished. MSG_RESET The conversion has been stopped using dacStopConversion()ordacStopConversionI().MSG_TIMEOUT The conversion has been stopped because an hardware error.
- Note
- Starting a follow-on conversion from the callback before this function returns is undefined behavior.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 346 of file hal_dac.c.
References dacStartConversionI(), HAL_RET_SUCCESS, osalSysLock(), osalSysUnlock(), osalThreadSuspendS(), and hal_dac_driver::thread.
◆ dacSynchronizeS()
| msg_t dacSynchronizeS | ( | DACDriver * | dacp, |
| sysinterval_t | timeout ) |
Synchronize to a conversion completion.
- Note
- This function can only be called by a single thread at time.
- Starting a follow-on conversion from the callback before this function returns is undefined behavior.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] timeout wait timeout
- Returns
- The wait result.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization request timed out. MSG_RESET if the conversion has been stopped.
- Function Class:
- This is an S-Class API, this function can be invoked from within a system lock zone by threads only.
Definition at line 382 of file hal_dac.c.
References DAC_ACTIVE, DAC_READY, MSG_OK, osalDbgAssert, osalDbgCheck, osalDbgCheckClassS, osalThreadSuspendTimeoutS(), hal_dac_driver::state, and hal_dac_driver::thread.
Referenced by dacSynchronize().

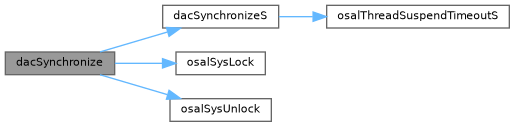
◆ dacSynchronize()
| msg_t dacSynchronize | ( | DACDriver * | dacp, |
| sysinterval_t | timeout ) |
Synchronize to a conversion completion.
- Note
- This function can only be called by a single thread at time.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] timeout wait timeout
- Returns
- The wait result.
- Return values
-
MSG_OK if operation completed without errors. MSG_TIMEOUT if synchronization request timed out. MSG_RESET if the conversion has been stopped.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 414 of file hal_dac.c.
References dacSynchronizeS(), osalSysLock(), and osalSysUnlock().
◆ dacAcquireBus()
| void dacAcquireBus | ( | DACDriver * | dacp | ) |
Gains exclusive access to the DAC bus.
This function tries to gain ownership to the DAC bus, if the bus is already being used then the invoking thread is queued.
- Precondition
- In order to use this function the option
DAC_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 437 of file hal_dac.c.
References hal_dac_driver::mutex, osalDbgCheck, and osalMutexLock().

◆ dacReleaseBus()
| void dacReleaseBus | ( | DACDriver * | dacp | ) |
Releases exclusive access to the DAC bus.
- Precondition
- In order to use this function the option
DAC_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 453 of file hal_dac.c.
References hal_dac_driver::mutex, osalDbgCheck, and osalMutexUnlock().

◆ dac_lld_init()
| void dac_lld_init | ( | void | ) |
Low level DAC driver initialization.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 63 of file hal_dac_lld.c.
References DACD1, and dacObjectInit().
Referenced by dacInit().

◆ dac_lld_start()
| void dac_lld_start | ( | DACDriver * | dacp | ) |
Configures and activates the DAC peripheral.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 77 of file hal_dac_lld.c.
References DAC_STOP, DACD1, and hal_dac_driver::state.
Referenced by dacStart().
◆ dac_lld_stop()
| void dac_lld_stop | ( | DACDriver * | dacp | ) |
Deactivates the DAC peripheral.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 98 of file hal_dac_lld.c.
References DAC_READY, DACD1, and hal_dac_driver::state.
Referenced by dacStop().
◆ dac_lld_put_channel()
| void dac_lld_put_channel | ( | DACDriver * | dacp, |
| dacchannel_t | channel, | ||
| dacsample_t | sample ) |
Outputs a value directly on a DAC channel.
- Parameters
-
[in] dacp pointer to the DACDriverobject[in] channel DAC channel number [in] sample value to be output
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 120 of file hal_dac_lld.c.
Referenced by dacPutChannelX().
◆ dac_lld_start_conversion()
| void dac_lld_start_conversion | ( | DACDriver * | dacp | ) |
Starts a DAC conversion.
Starts an asynchronous conversion operation.
- Note
- In
DAC_DHRM_8BIT_RIGHTmode the parameters passed to the callback are wrong because two samples are packed in a single dacsample_t element. This will not be corrected, do not rely on those parameters. -
In
DAC_DHRM_8BIT_RIGHT_DUALmode two samples are treated as a single 16 bits sample and packed into a single dacsample_t element. The num_channels must be set to one in the group conversion configuration structure.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 145 of file hal_dac_lld.c.
Referenced by dacStartConversionI().
◆ dac_lld_stop_conversion()
| void dac_lld_stop_conversion | ( | DACDriver * | dacp | ) |
Stops an ongoing conversion.
This function stops the currently ongoing conversion and returns the driver in the DAC_READY state. If there was no conversion being processed then the function does nothing.
- Parameters
-
[in] dacp pointer to the DACDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 160 of file hal_dac_lld.c.
Referenced by dacStopConversion(), and dacStopConversionI().
Variable Documentation
◆ DACD1
| DACDriver DACD1 |
DAC1 driver identifier.
Definition at line 39 of file hal_dac_lld.c.
Referenced by dac_lld_init(), dac_lld_start(), and dac_lld_stop().