Generic ADC Driver. More...
Detailed Description
Generic ADC Driver.
This module implements a generic ADC (Analog to Digital Converter) driver supporting a variety of buffer and conversion modes.
- Precondition
- In order to use the ADC driver the
HAL_USE_ADCoption must be enabled inhalconf.h.
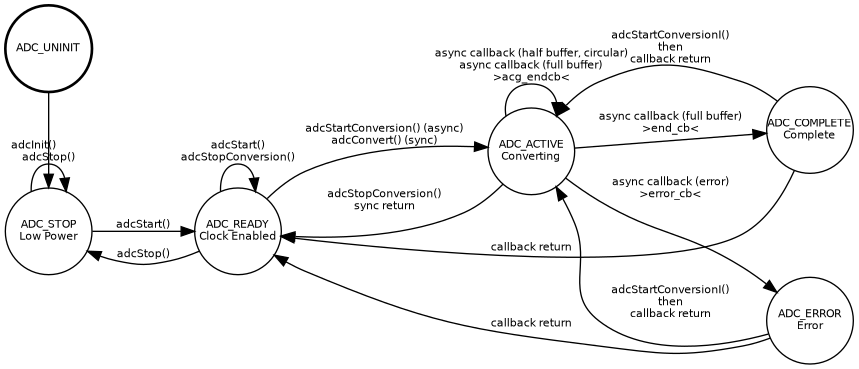
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment, any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).
ADC Operations
The ADC driver is quite complex, an explanation of the terminology and of the operational details follows.
ADC Conversion Groups
The ADCConversionGroup is the objects that specifies a physical conversion operation. This structure contains some standard fields and several implementation-dependent fields.
The standard fields define the CG mode, the number of channels belonging to the CG and the optional callbacks.
The implementation-dependent fields specify the physical ADC operation mode, the analog channels belonging to the group and any other implementation-specific setting. Usually the extra fields just mirror the physical ADC registers, please refer to the vendor's MCU Reference Manual for details about the available settings. Details are also available into the documentation of the ADC low level drivers and in the various sample applications.
ADC Conversion Modes
The driver supports several conversion modes:
- One Shot, the driver performs a single group conversion then stops.
- Linear Buffer, the driver performs a series of group conversions then stops. This mode is like a one shot conversion repeated N times, the buffer pointer increases after each conversion. The buffer is organized as an S(CG)*N samples matrix, when S(CG) is the conversion group size (number of channels) and N is the buffer depth (number of repeated conversions).
- Circular Buffer, much like the linear mode but the operation does not stop when the buffer is filled, it is automatically restarted with the buffer pointer wrapping back to the buffer base.
ADC Callbacks
The driver is able to invoke callbacks during the conversion process. A callback is invoked when the operation has been completed or, in circular mode, when the buffer has been filled and the operation is restarted. In circular mode a callback is also invoked when the buffer is half filled.
The "half filled" and "filled" callbacks in circular mode allow to implement "streaming processing" of the sampled data, while the driver is busy filling one half of the buffer the application can process the other half, this allows for continuous interleaved operations.
The driver is not thread safe for performance reasons, if you need to access the ADC bus from multiple threads then use the adcAcquireBus() and adcReleaseBus() APIs in order to gain exclusive access.

ADC configuration options | |
| #define | ADC_USE_WAIT TRUE |
| Enables synchronous APIs. | |
| #define | ADC_USE_MUTUAL_EXCLUSION TRUE |
Enables the adcAcquireBus() and adcReleaseBus() APIs. | |
Macro Functions | |
| #define | adcIsBufferComplete(adcp) |
| Buffer state. | |
Low level driver helper macros | |
| #define | _adc_reset_i(adcp) |
| Resumes a thread waiting for a conversion completion. | |
| #define | _adc_reset_s(adcp) |
| Resumes a thread waiting for a conversion completion. | |
| #define | _adc_wakeup_isr(adcp) |
| Wakes up the waiting thread. | |
| #define | _adc_timeout_isr(adcp) |
| Wakes up the waiting thread with a timeout message. | |
| #define | _adc_isr_half_code(adcp) |
| Common ISR code, half buffer event. | |
| #define | _adc_isr_full_code(adcp) |
| Common ISR code, full buffer event. | |
| #define | _adc_isr_error_code(adcp, err) |
| Common ISR code, error event. | |
Possible ADC errors mask bits. | |
| #define | ADC_ERR_DMAFAILURE 1U |
| #define | ADC_ERR_OVERFLOW 2U |
| #define | ADC_ERR_AWD 4U |
PLATFORM configuration options | |
| #define | PLATFORM_ADC_USE_ADC1 FALSE |
| ADC1 driver enable switch. | |
Data Structures | |
| struct | hal_adc_configuration_group |
| Conversion group configuration structure. More... | |
| struct | hal_adc_config |
| Driver configuration structure. More... | |
| struct | hal_adc_driver |
| Structure representing an ADC driver. More... | |
Macros | |
| #define | adc_lld_driver_fields |
| Low level fields of the ADC driver structure. | |
| #define | adc_lld_config_fields |
| Low level fields of the ADC configuration structure. | |
| #define | adc_lld_configuration_group_fields |
| Low level fields of the ADC configuration structure. | |
Typedefs | |
| typedef struct hal_adc_driver | ADCDriver |
| Type of a structure representing an ADC driver. | |
| typedef struct hal_adc_config | ADCConfig |
| Type of a structure representing an ADC driver configuration. | |
| typedef struct hal_adc_configuration_group | ADCConversionGroup |
| Conversion group configuration structure. | |
| typedef void(* | adccallback_t) (ADCDriver *adcp) |
| Type of an ADC notification callback. | |
| typedef void(* | adcerrorcallback_t) (ADCDriver *adcp, adcerror_t err) |
| Type of an ADC error callback. | |
| typedef uint16_t | adcsample_t |
| ADC sample data type. | |
| typedef uint16_t | adc_channels_num_t |
| Channels number in a conversion group. | |
| typedef uint32_t | adcerror_t |
| Type of an ADC error mask. | |
Enumerations | |
| enum | adcstate_t { ADC_UNINIT = 0 , ADC_STOP = 1 , ADC_READY = 2 , ADC_ACTIVE = 3 , ADC_COMPLETE = 4 , ADC_ERROR = 5 } |
| Driver state machine possible states. More... | |
Functions | |
| void | adcInit (void) |
| ADC Driver initialization. | |
| void | adcObjectInit (ADCDriver *adcp) |
Initializes the standard part of a ADCDriver structure. | |
| msg_t | adcStart (ADCDriver *adcp, const ADCConfig *config) |
| Configures and activates the ADC peripheral. | |
| void | adcStop (ADCDriver *adcp) |
| Deactivates the ADC peripheral. | |
| void | adcStartConversion (ADCDriver *adcp, const ADCConversionGroup *grpp, adcsample_t *samples, size_t depth) |
| Starts an ADC conversion. | |
| void | adcStartConversionI (ADCDriver *adcp, const ADCConversionGroup *grpp, adcsample_t *samples, size_t depth) |
| Starts an ADC conversion. | |
| void | adcStopConversion (ADCDriver *adcp) |
| Stops an ongoing conversion. | |
| void | adcStopConversionI (ADCDriver *adcp) |
| Stops an ongoing conversion. | |
| msg_t | adcConvert (ADCDriver *adcp, const ADCConversionGroup *grpp, adcsample_t *samples, size_t depth) |
| Performs an ADC conversion. | |
| void | adcAcquireBus (ADCDriver *adcp) |
| Gains exclusive access to the ADC peripheral. | |
| void | adcReleaseBus (ADCDriver *adcp) |
| Releases exclusive access to the ADC peripheral. | |
| void | adc_lld_init (void) |
| Low level ADC driver initialization. | |
| void | adc_lld_start (ADCDriver *adcp) |
| Configures and activates the ADC peripheral. | |
| void | adc_lld_stop (ADCDriver *adcp) |
| Deactivates the ADC peripheral. | |
| void | adc_lld_start_conversion (ADCDriver *adcp) |
| Starts an ADC conversion. | |
| void | adc_lld_stop_conversion (ADCDriver *adcp) |
| Stops an ongoing conversion. | |
Variables | |
| ADCDriver | ADCD1 |
| ADC1 driver identifier. | |
Macro Definition Documentation
◆ ADC_USE_WAIT
| #define ADC_USE_WAIT TRUE |
◆ ADC_USE_MUTUAL_EXCLUSION
| #define ADC_USE_MUTUAL_EXCLUSION TRUE |
Enables the adcAcquireBus() and adcReleaseBus() APIs.
- Note
- Disabling this option saves both code and data space.
◆ adcIsBufferComplete
| #define adcIsBufferComplete | ( | adcp | ) |
Buffer state.
- Note
- This function is meant to be called from the ADC callback only.
- This state is only meaningful for circular conversions, where it is used to distinguish the full buffer callback from the half buffer callback.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Returns
- The buffer state.
- Return values
-
false if the driver filled/sent the first half of the buffer. true if the driver filled/sent the second half of the buffer.
- Function Class:
- Special function, this function has special requirements see the notes.
◆ _adc_reset_i
| #define _adc_reset_i | ( | adcp | ) |
Resumes a thread waiting for a conversion completion.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 247 of file hal_adc.h.
Referenced by adcStopConversionI().
◆ _adc_reset_s
| #define _adc_reset_s | ( | adcp | ) |
Resumes a thread waiting for a conversion completion.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 257 of file hal_adc.h.
Referenced by adcStopConversion().
◆ _adc_wakeup_isr
| #define _adc_wakeup_isr | ( | adcp | ) |
◆ _adc_timeout_isr
| #define _adc_timeout_isr | ( | adcp | ) |
Wakes up the waiting thread with a timeout message.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _adc_isr_half_code
| #define _adc_isr_half_code | ( | adcp | ) |
Common ISR code, half buffer event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _adc_isr_full_code
| #define _adc_isr_full_code | ( | adcp | ) |
Common ISR code, full buffer event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread wakeup, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
◆ _adc_isr_error_code
| #define _adc_isr_error_code | ( | adcp, | |
| err ) |
Common ISR code, error event.
This code handles the portable part of the ISR code:
- Callback invocation.
- Waiting thread timeout signaling, if any.
- Driver state transitions.
- Note
- This macro is meant to be used in the low level drivers implementation only.
- Parameters
-
[in] adcp pointer to the ADCDriverobject[in] err platform dependent error code
- Function Class:
- Not an API, this function is for internal use only.
◆ ADC_ERR_DMAFAILURE
| #define ADC_ERR_DMAFAILURE 1U |
DMA operations failure.
Definition at line 38 of file hal_adc_lld.h.
◆ ADC_ERR_OVERFLOW
| #define ADC_ERR_OVERFLOW 2U |
ADC overflow condition.
Definition at line 39 of file hal_adc_lld.h.
◆ ADC_ERR_AWD
| #define ADC_ERR_AWD 4U |
Watchdog triggered.
Definition at line 40 of file hal_adc_lld.h.
◆ PLATFORM_ADC_USE_ADC1
| #define PLATFORM_ADC_USE_ADC1 FALSE |
ADC1 driver enable switch.
If set to TRUE the support for ADC1 is included.
- Note
- The default is
FALSE.
Definition at line 57 of file hal_adc_lld.h.
◆ adc_lld_driver_fields
| #define adc_lld_driver_fields |
Low level fields of the ADC driver structure.
Definition at line 91 of file hal_adc_lld.h.
◆ adc_lld_config_fields
| #define adc_lld_config_fields |
Low level fields of the ADC configuration structure.
Definition at line 98 of file hal_adc_lld.h.
◆ adc_lld_configuration_group_fields
| #define adc_lld_configuration_group_fields |
Low level fields of the ADC configuration structure.
Definition at line 105 of file hal_adc_lld.h.
Typedef Documentation
◆ ADCDriver
| typedef struct hal_adc_driver ADCDriver |
◆ ADCConfig
| typedef struct hal_adc_config ADCConfig |
◆ ADCConversionGroup
| typedef struct hal_adc_configuration_group ADCConversionGroup |
Conversion group configuration structure.
This implementation-dependent structure describes a conversion operation.
- Note
- The use of this configuration structure requires knowledge of STM32 ADC cell registers interface, please refer to the STM32 reference manual for details.
◆ adccallback_t
| typedef void(* adccallback_t) (ADCDriver *adcp) |
◆ adcerrorcallback_t
| typedef void(* adcerrorcallback_t) (ADCDriver *adcp, adcerror_t err) |
◆ adcsample_t
| typedef uint16_t adcsample_t |
ADC sample data type.
Definition at line 72 of file hal_adc_lld.h.
◆ adc_channels_num_t
| typedef uint16_t adc_channels_num_t |
Channels number in a conversion group.
Definition at line 77 of file hal_adc_lld.h.
◆ adcerror_t
| typedef uint32_t adcerror_t |
Type of an ADC error mask.
Definition at line 82 of file hal_adc_lld.h.
Enumeration Type Documentation
◆ adcstate_t
| enum adcstate_t |
Function Documentation
◆ adcInit()
| void adcInit | ( | void | ) |
ADC Driver initialization.
- Note
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:
- Object or module nitializer function.
Definition at line 56 of file hal_adc.c.
References adc_lld_init().
Referenced by halInit().

◆ adcObjectInit()
| void adcObjectInit | ( | ADCDriver * | adcp | ) |
Initializes the standard part of a ADCDriver structure.
- Parameters
-
[out] adcp pointer to the ADCDriverobject
- Function Class:
- Object or module nitializer function.
Definition at line 68 of file hal_adc.c.
References ADC_STOP, hal_adc_driver::config, hal_adc_driver::depth, hal_adc_driver::grpp, hal_adc_driver::mutex, osalMutexObjectInit(), hal_adc_driver::samples, hal_adc_driver::state, and hal_adc_driver::thread.
Referenced by adc_lld_init().

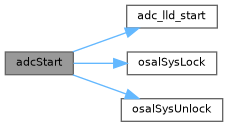
◆ adcStart()
Configures and activates the ADC peripheral.
- Parameters
-
[in] adcp pointer to the ADCDriverobject[in] config pointer to the ADCConfigobject. Depending on the implementation the value can beNULL.
- Returns
- The operation status.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 96 of file hal_adc.c.
References adc_lld_start(), ADC_READY, ADC_STOP, hal_adc_driver::config, HAL_RET_SUCCESS, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_adc_driver::state.
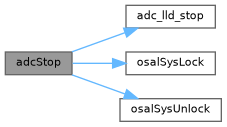
◆ adcStop()
| void adcStop | ( | ADCDriver * | adcp | ) |
Deactivates the ADC peripheral.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 132 of file hal_adc.c.
References adc_lld_stop(), ADC_READY, ADC_STOP, hal_adc_driver::config, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_adc_driver::state.
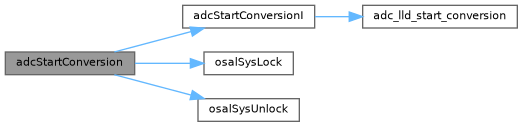
◆ adcStartConversion()
| void adcStartConversion | ( | ADCDriver * | adcp, |
| const ADCConversionGroup * | grpp, | ||
| adcsample_t * | samples, | ||
| size_t | depth ) |
Starts an ADC conversion.
Starts an asynchronous conversion operation.
- Note
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially written into the buffer with no gaps.
- Parameters
-
[in] adcp pointer to the ADCDriverobject[in] grpp pointer to a ADCConversionGroupobject[out] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 164 of file hal_adc.c.
References adcStartConversionI(), osalSysLock(), and osalSysUnlock().
◆ adcStartConversionI()
| void adcStartConversionI | ( | ADCDriver * | adcp, |
| const ADCConversionGroup * | grpp, | ||
| adcsample_t * | samples, | ||
| size_t | depth ) |
Starts an ADC conversion.
Starts an asynchronous conversion operation.
- Postcondition
- The callbacks associated to the conversion group will be invoked on buffer fill and error events.
- Note
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially written into the buffer with no gaps.
- Parameters
-
[in] adcp pointer to the ADCDriverobject[in] grpp pointer to a ADCConversionGroupobject[out] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 192 of file hal_adc.c.
References ADC_ACTIVE, ADC_ERROR, adc_lld_start_conversion(), ADC_READY, hal_adc_driver::depth, hal_adc_driver::grpp, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, hal_adc_driver::samples, and hal_adc_driver::state.
Referenced by adcConvert(), and adcStartConversion().

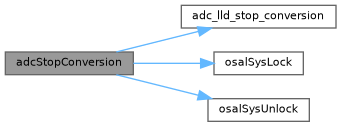
◆ adcStopConversion()
| void adcStopConversion | ( | ADCDriver * | adcp | ) |
Stops an ongoing conversion.
This function stops the currently ongoing conversion and returns the driver in the ADC_READY state. If there was no conversion being processed then the function does nothing.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 221 of file hal_adc.c.
References _adc_reset_s, ADC_ACTIVE, adc_lld_stop_conversion(), ADC_READY, hal_adc_driver::grpp, osalDbgAssert, osalDbgCheck, osalSysLock(), osalSysUnlock(), and hal_adc_driver::state.
◆ adcStopConversionI()
| void adcStopConversionI | ( | ADCDriver * | adcp | ) |
Stops an ongoing conversion.
This function stops the currently ongoing conversion and returns the driver in the ADC_READY state. If there was no conversion being processed then the function does nothing.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- This is an I-Class API, this function can be invoked from within a system lock zone by both threads and interrupt handlers.
Definition at line 247 of file hal_adc.c.
References _adc_reset_i, ADC_ACTIVE, ADC_COMPLETE, adc_lld_stop_conversion(), ADC_READY, hal_adc_driver::grpp, osalDbgAssert, osalDbgCheck, osalDbgCheckClassI, and hal_adc_driver::state.

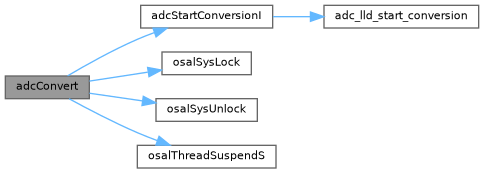
◆ adcConvert()
| msg_t adcConvert | ( | ADCDriver * | adcp, |
| const ADCConversionGroup * | grpp, | ||
| adcsample_t * | samples, | ||
| size_t | depth ) |
Performs an ADC conversion.
Performs a synchronous conversion operation.
- Note
- The buffer is organized as a matrix of M*N elements where M is the channels number configured into the conversion group and N is the buffer depth. The samples are sequentially written into the buffer with no gaps.
- If the configured callback starts another conversion before this function returns then the behavior is undefined.
- Parameters
-
[in] adcp pointer to the ADCDriverobject[in] grpp pointer to a ADCConversionGroupobject[out] samples pointer to the samples buffer [in] depth buffer depth (matrix rows number). The buffer depth must be one or an even number.
- Returns
- The operation result.
- Return values
-
MSG_OK Conversion finished. MSG_RESET The conversion has been stopped using adcStopConversion()oradcStopConversionI(), the result buffer may contain incorrect data.MSG_TIMEOUT The conversion has been stopped because an hardware error.
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 290 of file hal_adc.c.
References adcStartConversionI(), osalDbgAssert, osalSysLock(), osalSysUnlock(), osalThreadSuspendS(), and hal_adc_driver::thread.
◆ adcAcquireBus()
| void adcAcquireBus | ( | ADCDriver * | adcp | ) |
Gains exclusive access to the ADC peripheral.
This function tries to gain ownership to the ADC bus, if the bus is already being used then the invoking thread is queued.
- Precondition
- In order to use this function the option
ADC_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 317 of file hal_adc.c.
References hal_adc_driver::mutex, osalDbgCheck, and osalMutexLock().

◆ adcReleaseBus()
| void adcReleaseBus | ( | ADCDriver * | adcp | ) |
Releases exclusive access to the ADC peripheral.
- Precondition
- In order to use this function the option
ADC_USE_MUTUAL_EXCLUSIONmust be enabled.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Normal API, this function can be invoked by regular system threads but not from within a lock zone.
Definition at line 333 of file hal_adc.c.
References hal_adc_driver::mutex, osalDbgCheck, and osalMutexUnlock().

◆ adc_lld_init()
| void adc_lld_init | ( | void | ) |
Low level ADC driver initialization.
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 65 of file hal_adc_lld.c.
References ADCD1, and adcObjectInit().
Referenced by adcInit().

◆ adc_lld_start()
| void adc_lld_start | ( | ADCDriver * | adcp | ) |
Configures and activates the ADC peripheral.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 80 of file hal_adc_lld.c.
References ADC_STOP, ADCD1, and hal_adc_driver::state.
Referenced by adcStart().
◆ adc_lld_stop()
| void adc_lld_stop | ( | ADCDriver * | adcp | ) |
Deactivates the ADC peripheral.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 101 of file hal_adc_lld.c.
References ADC_READY, ADCD1, and hal_adc_driver::state.
Referenced by adcStop().
◆ adc_lld_start_conversion()
| void adc_lld_start_conversion | ( | ADCDriver * | adcp | ) |
Starts an ADC conversion.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 122 of file hal_adc_lld.c.
Referenced by adcStartConversionI().
◆ adc_lld_stop_conversion()
| void adc_lld_stop_conversion | ( | ADCDriver * | adcp | ) |
Stops an ongoing conversion.
- Parameters
-
[in] adcp pointer to the ADCDriverobject
- Function Class:
- Not an API, this function is for internal use only.
Definition at line 134 of file hal_adc_lld.c.
Referenced by adcStopConversion(), and adcStopConversionI().
Variable Documentation
◆ ADCD1
| ADCDriver ADCD1 |
ADC1 driver identifier.
Definition at line 41 of file hal_adc_lld.c.
Referenced by adc_lld_init(), adc_lld_start(), and adc_lld_stop().